

Comparison model for obstacle avoidance behaviors of vehicle under manned and unmanned conditions
An unmanned vehicle and unmanned driving technology, which is applied in the field of comparison model of obstacle avoidance behavior of manned and unmanned vehicles, can solve the problem of insufficient research on the intelligent behavior of unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
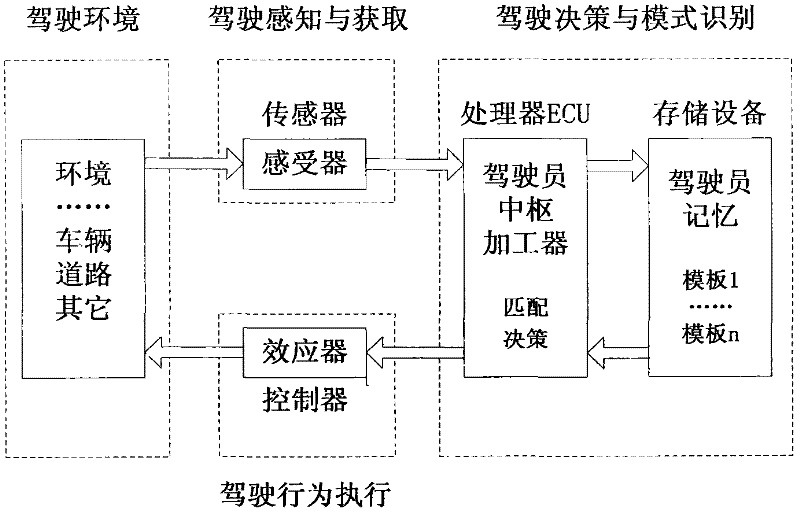
[0022] Such as figure 1 As shown, the driver relies on the eyes, ears, hands and other receptors to receive information, and these senses constitute a sensory subsystem (receptors). The information received by the receptors is transmitted to the brain through the nerves. In the information processing subsystem (central processor) of the brain, the incoming information is recognized and corresponding decisions are made. These functions require the participation of long-term memory and short-term memory in the storage subsystem (memory). The processed information can also be stored in long-term or short-term memory, and various movement and language responses can be generated through the hands and feet, control devices, language organs, etc. in the response subsystem (effector); Visual, auditory, tactile and other sensors receive information, and these sensors transmit the obtained information to the ECU processor through the bus and protocol. In the ECU processor, the incomi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More