

3-3-1 type seven-mobility spatial hydraulic excavator
A hydraulic excavator and mobility technology, applied in mechanically driven excavators/dredgers, etc., can solve the problems of low work efficiency, inflexible movements, limited work space, etc., and achieve high work efficiency, large work space, The effect of the flexible output trajectory of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
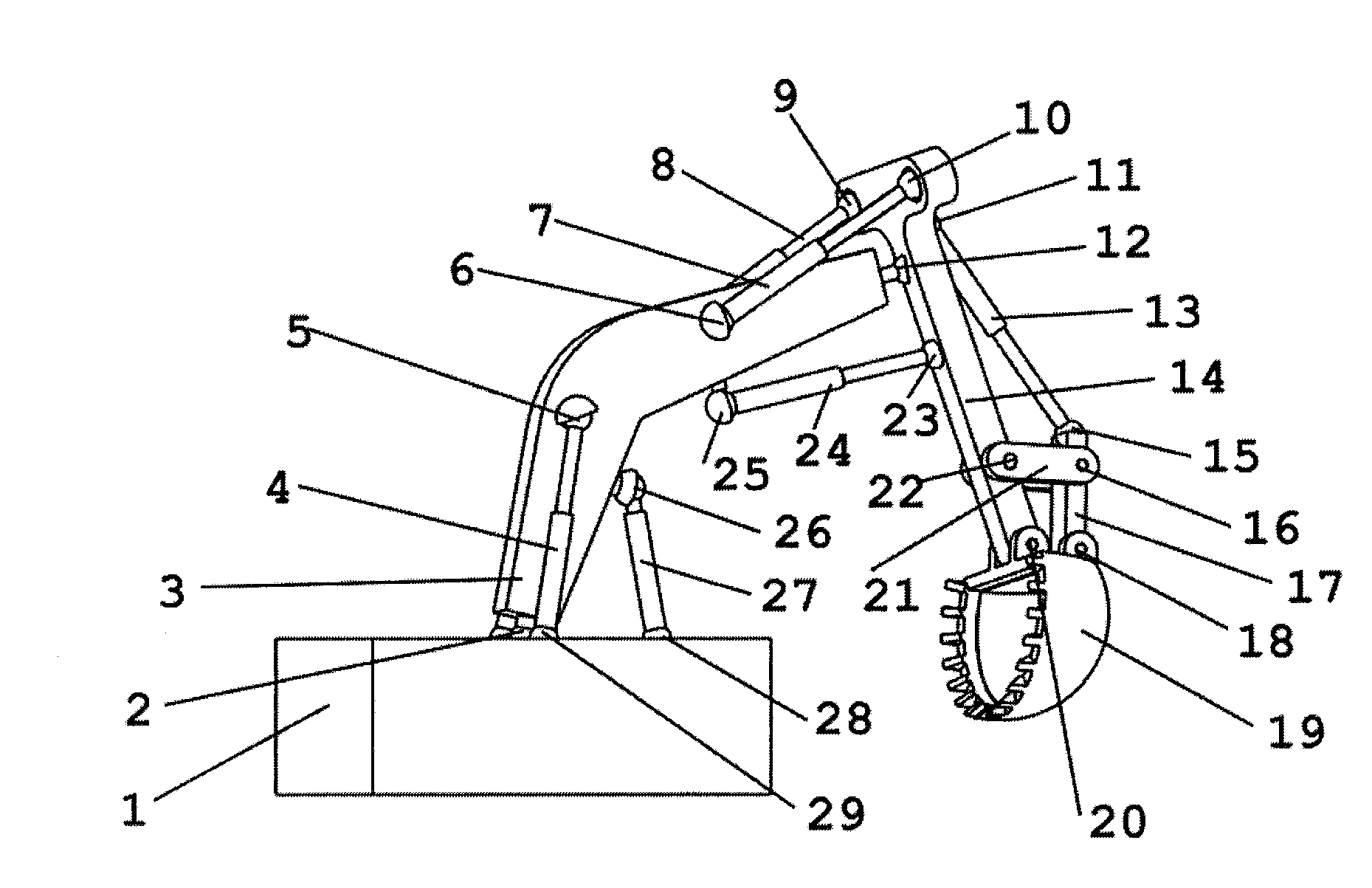
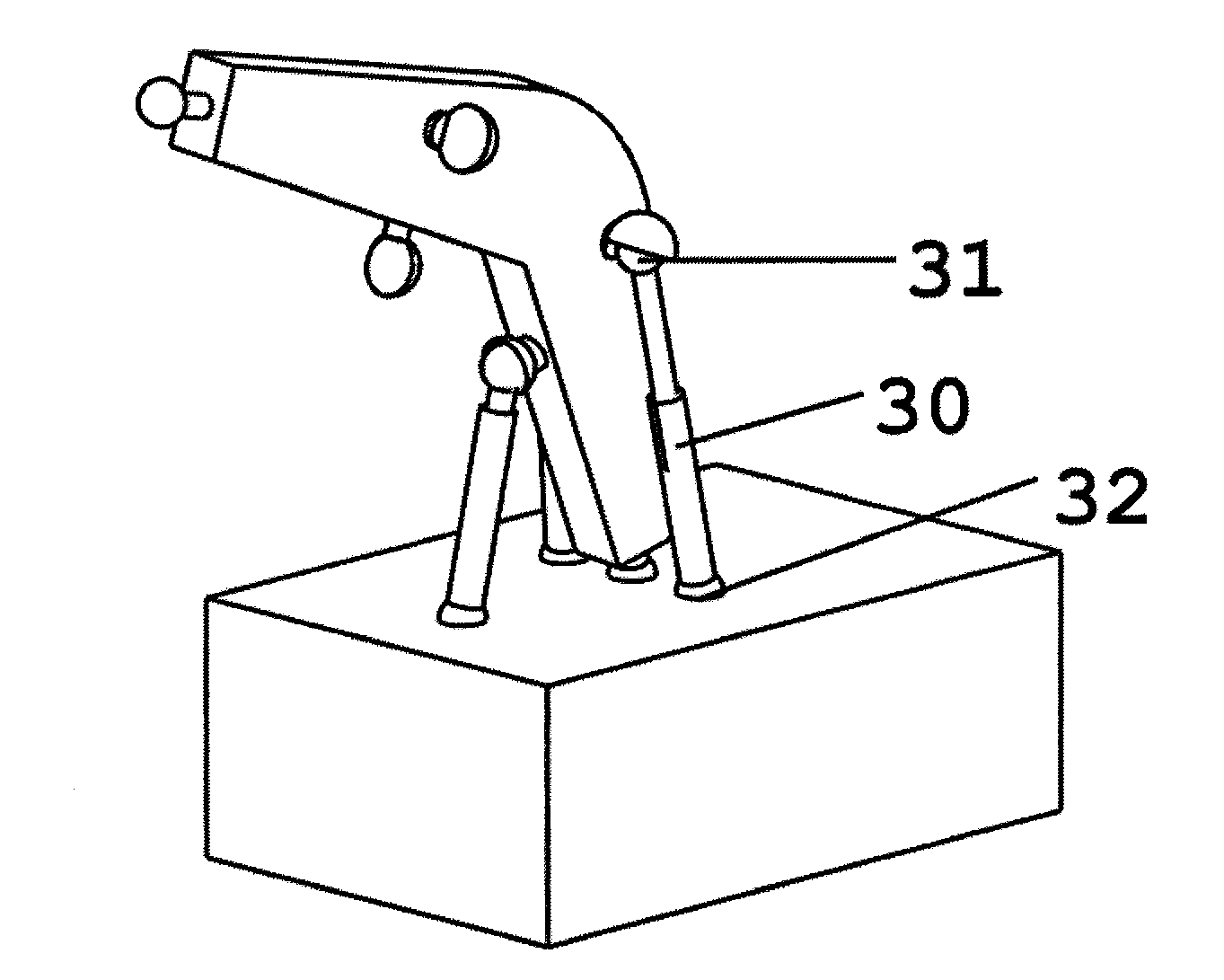
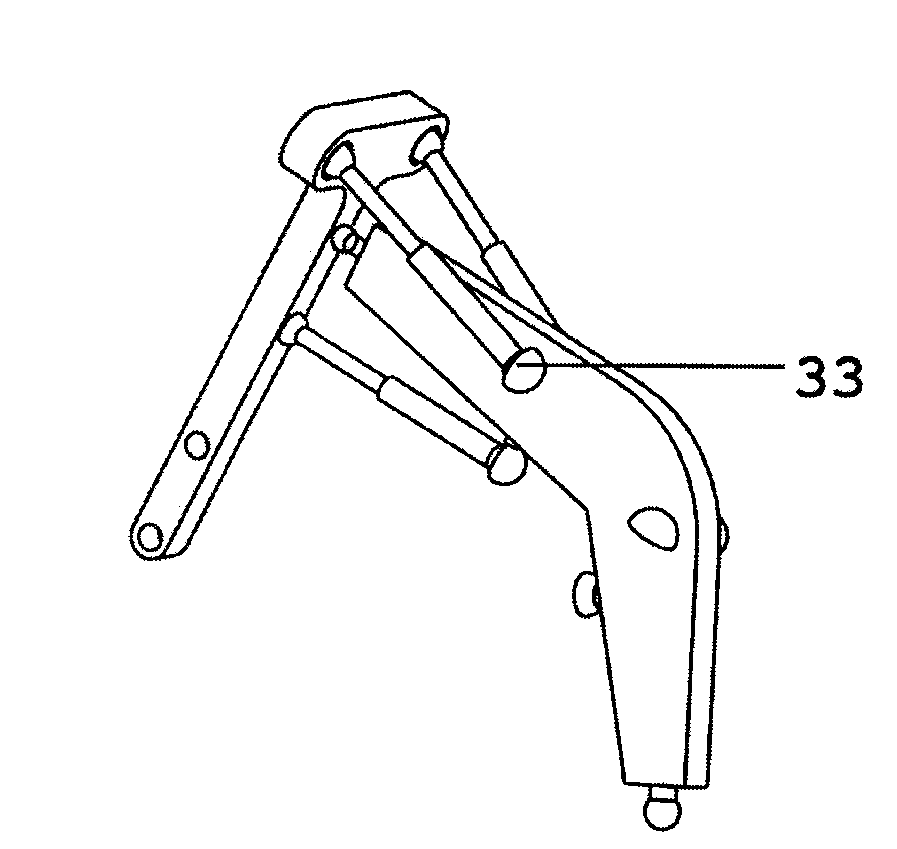
[0018] control figure 1 , 2 , 3 and 4, the 3-3-1 type seven-activity space hydraulic excavator is composed of a three-dimensional rotating arm mechanism, a three-dimensional rotating arm mechanism and a one-dimensional rotating bucket mechanism.
[0019] control figure 1 , 2 , the three-dimensional rotating arm mechanism is composed of the three-dimensional rotating arm 3, the first hydraulic cylinder 4, the second hydraulic cylinder 27 and the third hydraulic cylinder 30, the three-dimensional rotating arm 3 is connected to the frame 1 through the first spherical pair 2, the second One end of a hydraulic cylinder 4 is connected to the frame 1 through the second spherical pair 29, the other end of the first hydraulic cylinder 4 is connected to the three-dimensional rotating arm 3 through the third spherical pair 5, and one ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More