

Controllable mechanism type excavating robot
A robotic and mechanism-based technology, applied in the field of machinery, can solve the problems affecting the increase of the bucket capacity and operating weight, and the high performance requirements of the driving arm, and achieve the effect of flexible output trajectory of the mechanism, light weight, and no cumulative error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
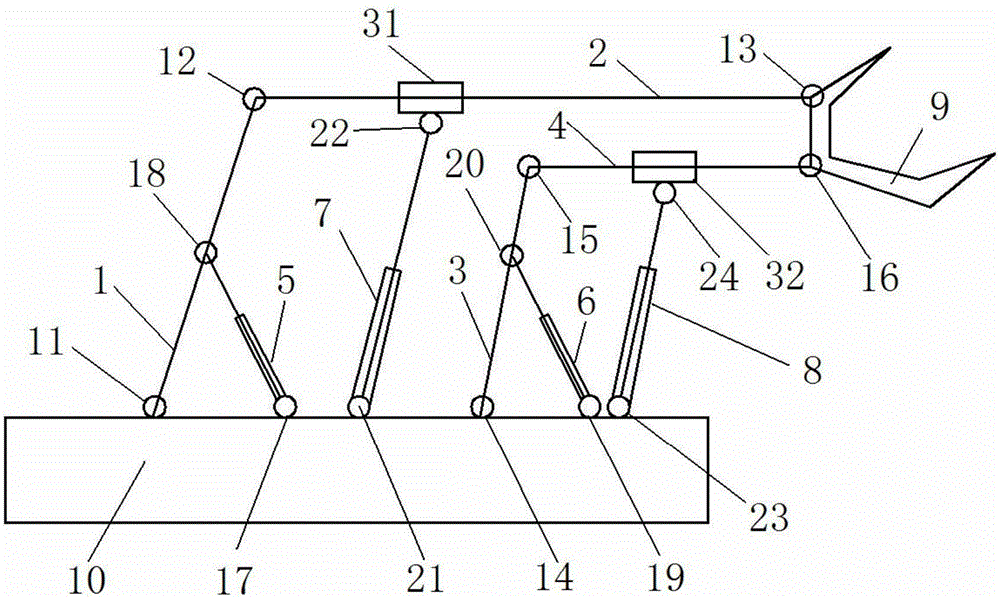
[0017] A controllable mechanism excavating robot, comprising a first connecting rod 1, a second connecting rod 2, a third connecting rod 3, a fourth connecting rod 4, a first telescopic rod 5, a second telescopic rod 6, and a third telescopic rod 7. The fourth telescopic rod 8, the first slider 31, the second slider 32, the bucket 9 and the frame 10,
[0018] One end of the first connecting rod 1 is connected to the frame 10 through a rotating pair 11, the other end of the first connecting rod 1 is connected with one end of the second connecting rod 2 through a rotating pair 12, and the other end of the second connecting rod 2 is connected through a rotating pair 3 13 is connected on the bucket 8,
[0019] One end of the third connecting rod 3 is connected to the frame 10 through the rotating pair four 14, the other end of the third connecting rod 3 is connected with one end of the fourth connecting rod 4 through the rotating pair five 15, and the other end of the fourth conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More