

Air flight and omnibearing adsorption micro-robot
A micro-robot, all-round technology, applied in the field of robotics, can solve the problems of unsuitable detection application requirements and high power consumption, achieve wide application prospects and important economic benefits, reduce power consumption, and high efficiency in obstacle crossing capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
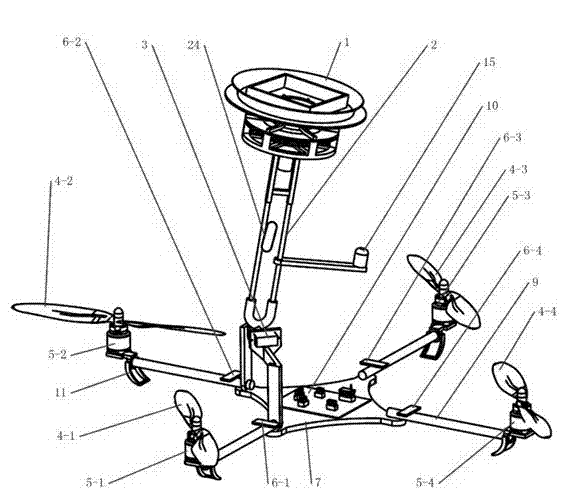
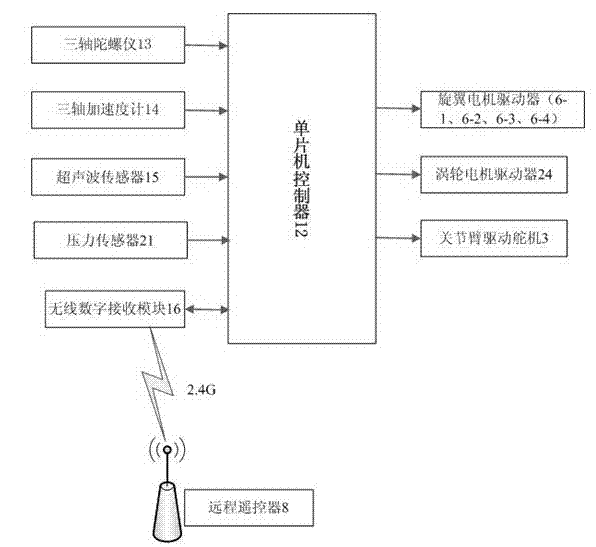
[0016] combine figure 1 and figure 2 , the airflight and omni-directional adsorption micro-robot of the present invention comprises an adsorption device 1, an adsorption articulated arm 2, an articulated arm driving steering gear 3, four rotors 4-1, 4-2, 4-3, 4-4, four Rotor motor 5-1, 5-2, 5-3, 5-4, four drivers 6-1, 6-2, 6-3, 6-4, robot body 7, remote controller 8, adsorption device 1 setting At one end of the adsorption articulated arm 2, the other end of the adsorption articulated arm 2 is connected to the output shaft of the articulated arm driving steering gear 3, the articulated arm driving steering gear 3 is arranged on the steering gear bracket, and the steering gear bracket is fixedly installed on the robot body 7, four rotors 4-1, 4-2, 4-3, 4-4 are fixedly mounted on respective rotor motors 5-1, 5-2, 5-3, 5-4, and four drivers 6 -1, 6-2, 6-3, and 6-4 are connected with respective rotor motors 5-1, 5-2, 5-3, and 5-4, and the remote controller 8 sends control comma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More