

Object-learning robot and method
A technology of robots and objects, applied in the direction of instruments, computer components, character and pattern recognition, etc., can solve problems affecting usefulness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
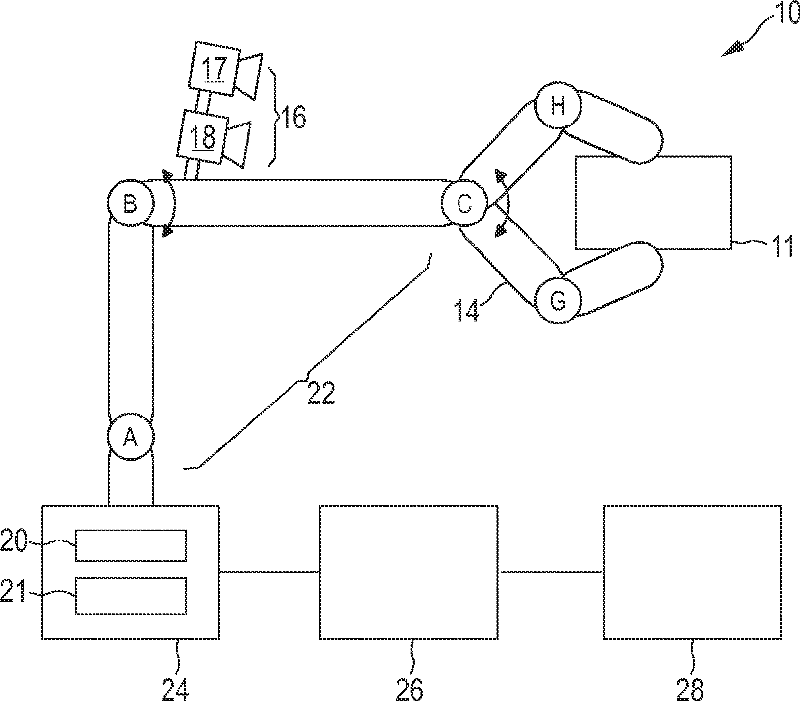
[0044] figure 1 The arrangement of the object learning robot 10 is shown. The robot 10 includes a gripper 14 , an optical system 16 , an input device 26 , a controller 24 and an image processing device 28 . Gripper 14 allows robot 10 to receive, hold and manipulate object 11 to be learned. Optical system 16 includes a field of view for viewing gripper 14 and any object 11 to be learned. Input device 26 communicates with controller 24 and allows a user to identify to robot 10 an object 11 to be learned. The input device 26 for providing properties of the object may be an audio device such as a microphone or may be a keyboard, touchpad or other device for identifying the object to the robot 10 . A user may control the robot 10 to pick up objects using an input device 26 (eg, a remote / tactile interface). Alternatively, the end user may hold the robot 10 by the arm or clip 14 and teach it directly, or the robot 10 may be directed by a teach interface 21 connected to the arm 22...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More