

Vector-field-based small-sized unmanned plane wind-field anti-interference self-adaptive control method
A small unmanned aerial vehicle, adaptive control technology, applied in the direction of adaptive control, two-dimensional position/channel control, general control system, etc., can solve problems such as insufficient control methods, and achieve the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
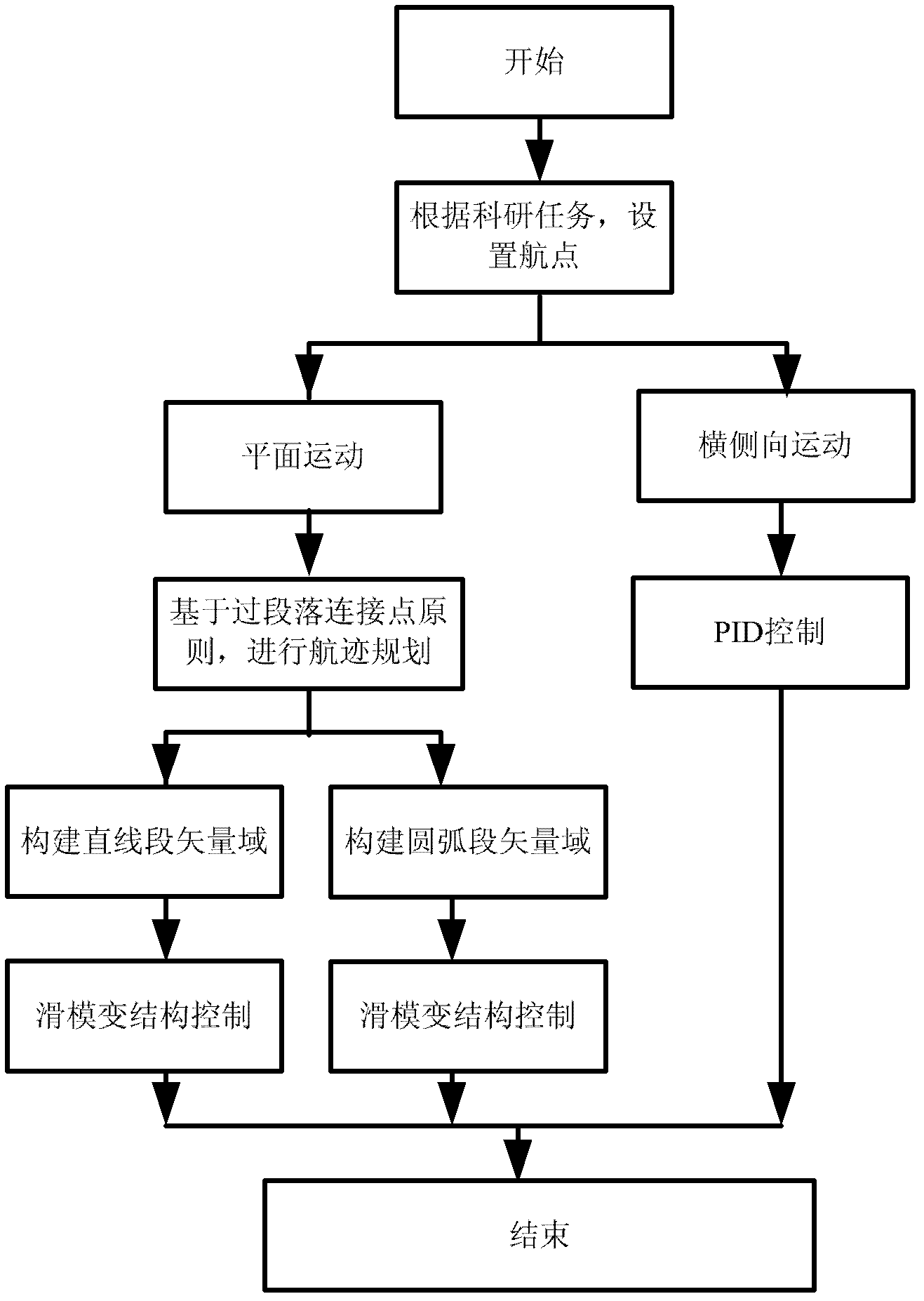
[0065] Such as figure 1 Shown, the specific implementation method of the present invention is as follows:
[0066] (1) Track planning
[0067] Based on the airborne sensors, the small unmanned aerial vehicle can obtain relatively accurate attitude information and position information, and through the PID control method, achieve highly stable control, then the three-dimensional track control of the small unmanned aerial vehicle under the disturbance of the wind field can be simplified to two dimensional plane control, its trajectory on the plane can be expressed by the following formula:
[0068] x · = V a cos ψ + W x - - - ( 1 )
[0069] y · = V a sin ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More