

Anti-destabilization framework type walking assisting legs
A frame-based, loss-proof technology, applied in the field of robotics, can solve problems such as overcoming obstacles and difficulty in going up and down stairs, and achieves the effect of improving walking ability and ability expansion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
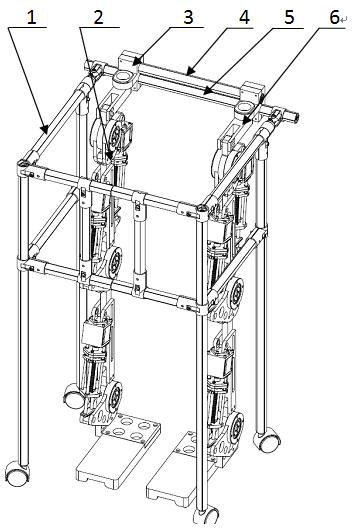
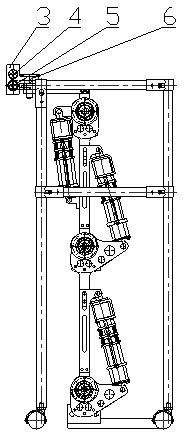
[0024] see figure 1 — Figure 6 , the anti-instability frame-type walking aid leg, including a detachable mobile frame (1) and an exoskeleton mechanical leg (2), in which there are two connecting seats (3) and a A connecting long rod (5) is connected with two connecting frames (6); and the two connecting frames (6) are respectively connected with the two exoskeleton mechanical legs (2). Between the long connecting rod (5) and the installation hole of the universal joint (7) on the frame (1), there is an empty sleeve fit, so that the frame can rotate around the connecting long rod (5), so that the detachable The front part of the mobile frame (1) can be opened and closed freely in the horizontal direction. The two exoskeleton mechanical legs (2) are hinged with the connecting frame (6) through the thigh skeleton (20) through the hip joint (18), and the thigh skeleton (20) through the knee joint (22) and the lower leg skeleton (23) Hinged, the lower leg frame (23) is hinged t...
Embodiment 2
[0026] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
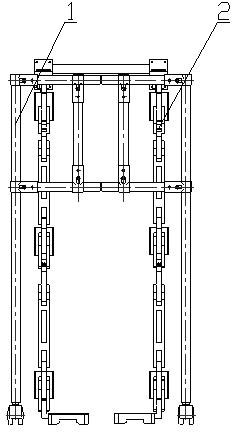
[0027] see figure 2 — Figure 5 , the structure of the detachable movable frame is: using eight right-angle joints (8) and four four-way joints (10) to connect two upper cross bars (9), two lower cross bars (13), and the front upper The cross bar (11), the front lower cross bar (15) and four longitudinal bars (16) join together to form a rectangular frame with two layers of cross bars. The universal wheel (17), the upper horizontal bar of the frame (1) and the connecting rod (5) are connected by a universal joint (7), and the installation hole of the universal joint (7) is connected with the connecting rod (5) An empty sleeve is used between the outer diameters, so that the whole frame can rotate around the connecting rod. The upper cross bar (11) and the lower cross bar (15) at the front of the frame are cut off from it, and small vertical bars (14) are added on both s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More