

Calibrating method for centralized vision system of soccer robot
A football robot and vision system technology, which is applied in the field of centralized control football robot vision system calibration, can solve the problems of ignoring the camera imaging model, etc., and achieve the effects of fast calibration speed, reduced complexity, and improved calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
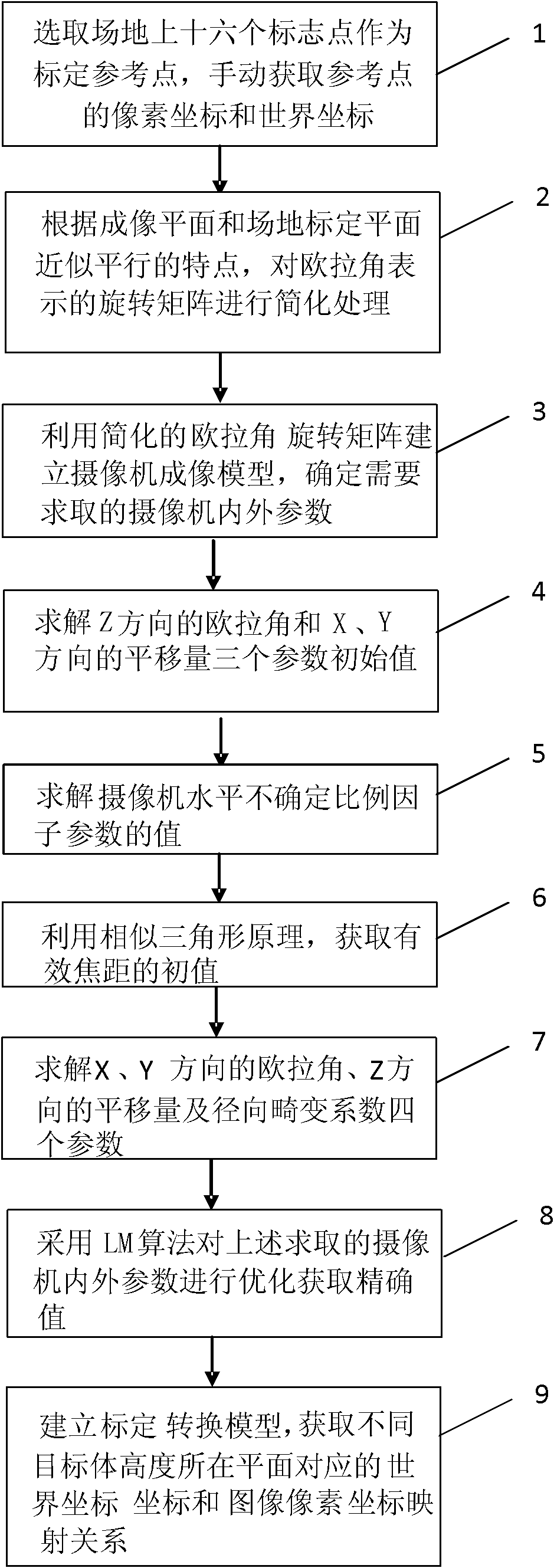
[0088] Such as figure 1 As shown, the vision system calibration method of the football robot camera includes the following steps:
[0089] Step 1: Select sixteen marker points on the site as calibration reference points, and manually obtain the pixel coordinates and world coordinates of the reference points.
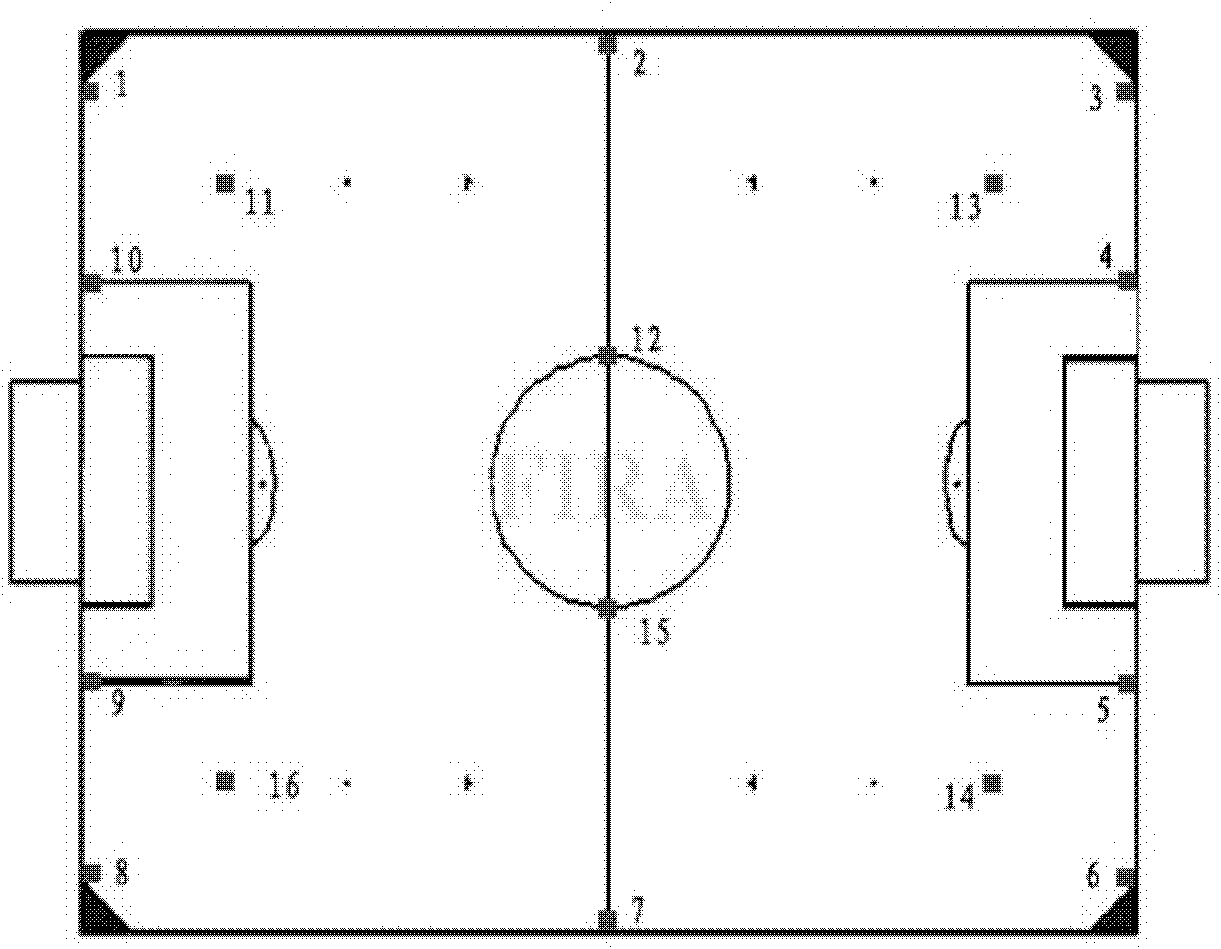
[0090] The selected sixteen calibration reference points are distributed as follows: figure 2As shown, when establishing the imaging model, the upper left corner of the site is selected as the origin of the world coordinate system. According to the standard size of the FIRA Mirosot5:5 site, the world coordinates of the sixteen calibration reference points are (0, 7), (110, 0 ), (220, 7), (220, 50), (220, 130), (220, 173), (110, 180), (0, 173), (0, 130) (0, 50), ( 30, 30), (110, 65), (190, 30), (190, 150), (110, 115), (30, 150), the coordinate unit is centimeter. When obtaining the pixel coordinates of the reference point image, zoom in on the local image where the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More