Multiple-antenna GPS(Global Positioning System)/GF-INS (Gyroscope-Free-Inertial Navigation System) depth combination attitude determining method
A GF-INS, multi-antenna technology, applied in satellite radio beacon positioning system, navigation through speed/acceleration measurement, radio wave measurement system, etc., can solve eclipse, research and application limitations, attitude angle calculation errors, etc. problem, to achieve the effect of overcoming the difficulty of installation, improving the anti-interference ability, and improving the search success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
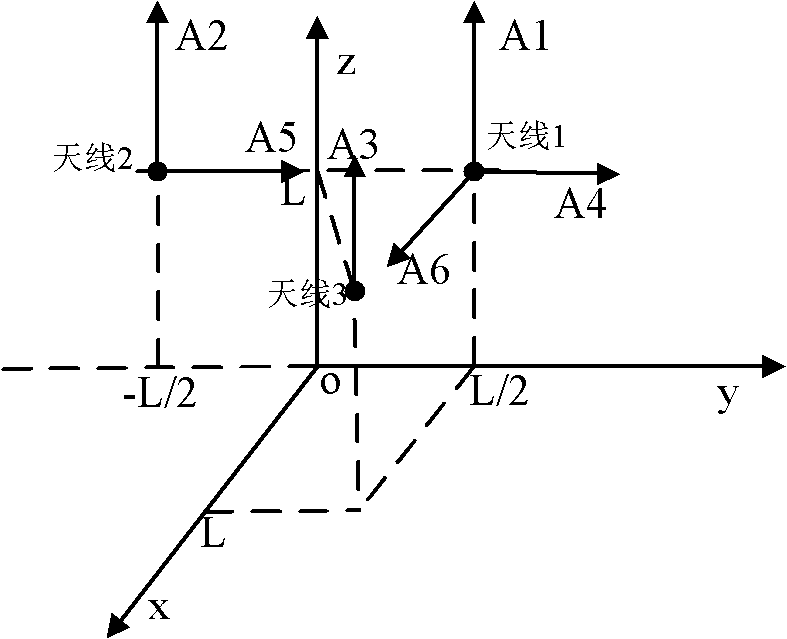
[0058] Such as figure 1 As shown, in the embodiment of the present invention, GF-INS adopts an easy-to-install accelerometer configuration scheme, which includes 6 accelerometers A1, A2, A3, A4, A5, A6; there are 3 GPS antennas: main antenna 1 , secondary antenna 2, 3,; accelerometers A1, A4, A6 are installed together with main antenna 1, A2 and A5 are installed together with secondary antenna 2, A3 is installed together with secondary antenna 3; accelerometers A1, A2, A3 The sensitive direction of A4 and A5 is along the positive direction of the z-axis of the carrier coordinate system, the sensitive direction of A4 and A5 is along the positive direction of the x-axis of the carrier coordinate system, and the sensitive direction of A6 is along the positive direction of the y-axis of the carrier coordinate system; the three antennas are respectively fixed on the three carrier Above; the base line formed by the carrier fixedly connected to the main antenna 1 and the auxiliary an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com