

Humanoid robot foot plate mechanism with multiple degrees of freedom
A technology of humanoid robot and degree of freedom, applied in the field of robotics, to achieve the effect of reducing the complexity of control and structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
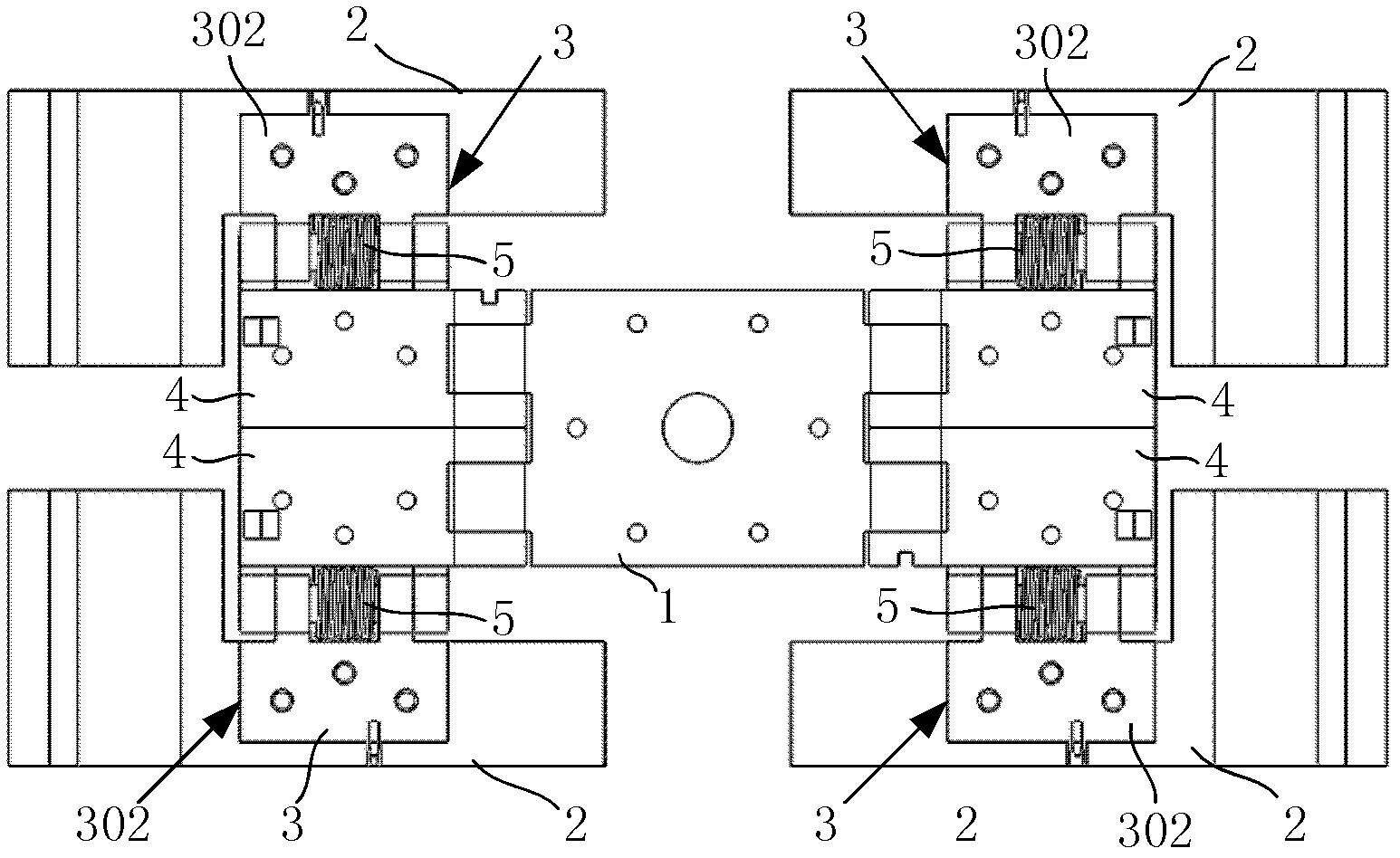
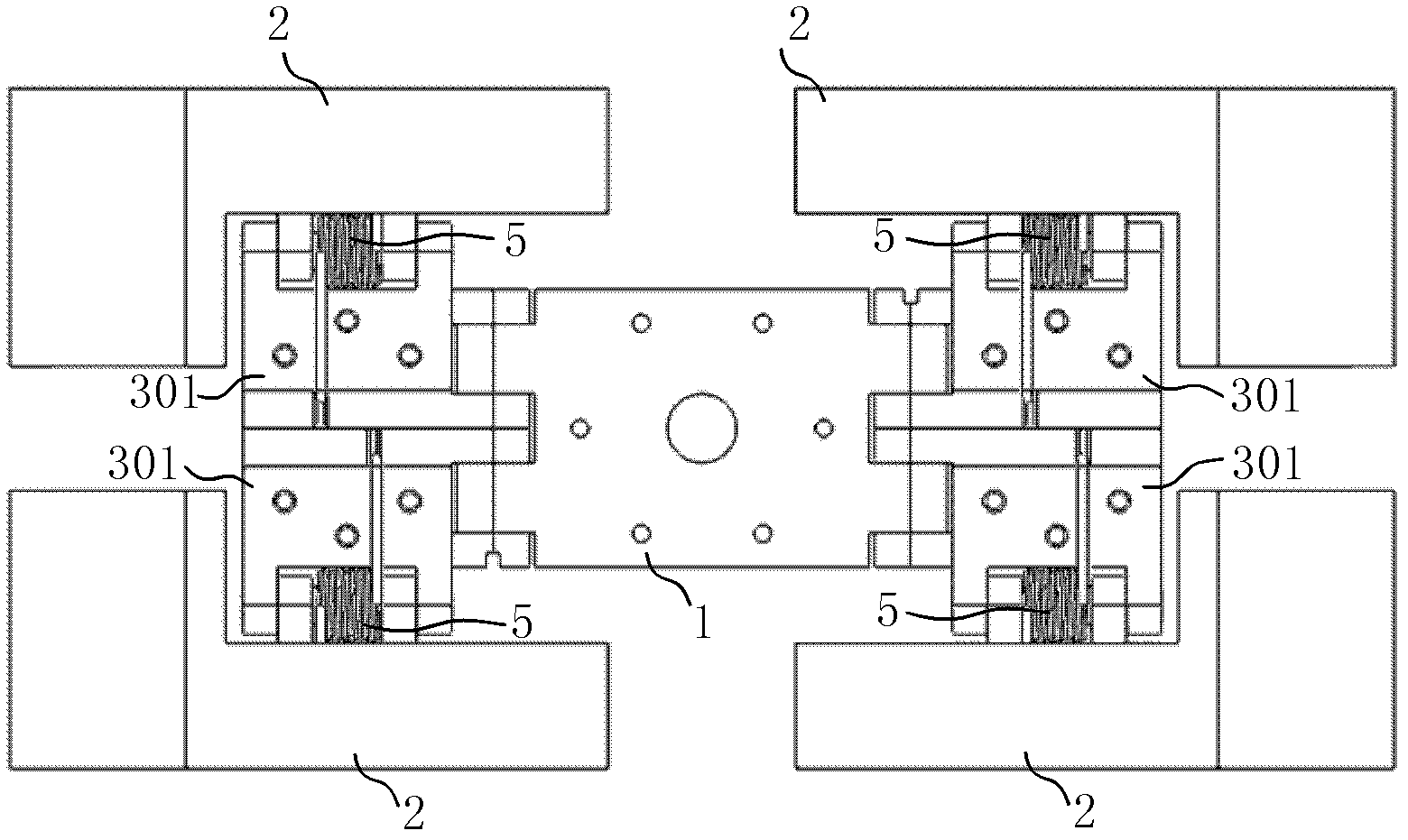
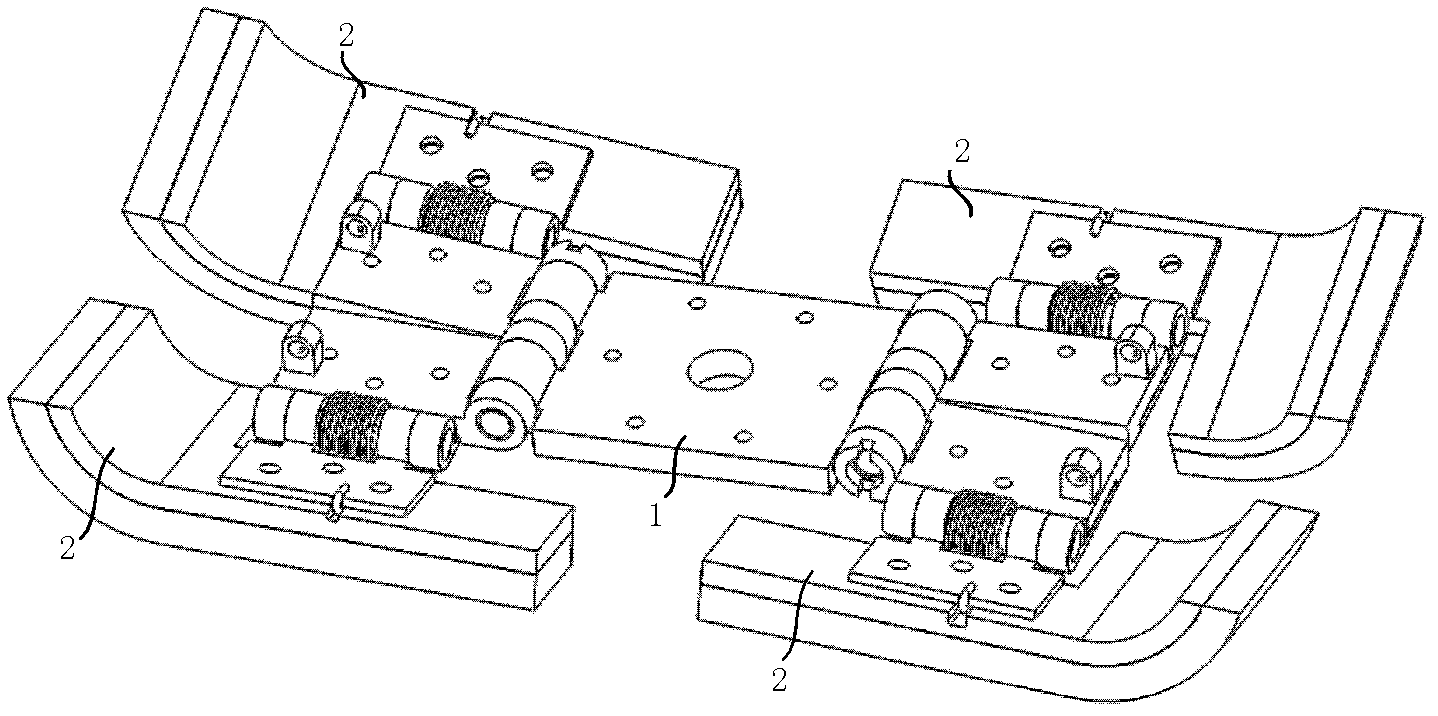
[0023] A multi-degree-of-freedom foot plate mechanism of a humanoid robot in the present invention adopts a passive toe form, and is composed of a central fixed plate 1 and four foot plates 2, such as figure 1 , figure 2 said;
[0024] The central fixing plate 1 is a rectangle arranged horizontally, and is fixedly connected with the ankle joint of the humanoid robot. The four foot plates 2 have the same structure, and each foot plate 2 is connected with the central fixed plate 1 through a hinge 3 . Its specific connection mode is: two connecting plates 4 are respectively hinged on the front side and the rear side of the central fixing plate 1 . Each connecting plate 4 is connected to a foot plate 2 through a hinge 3, wherein the first hinge 301 in the hinge 3 is fixedly connected to the connecting plate 4, the second hinge 302 in the hinge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More