

Shape measuring apparatus, robot system, and shape measuring method
A measurement and camera technology, applied in the field of shape measurement devices, can solve the problem of long time for scanning parts group
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
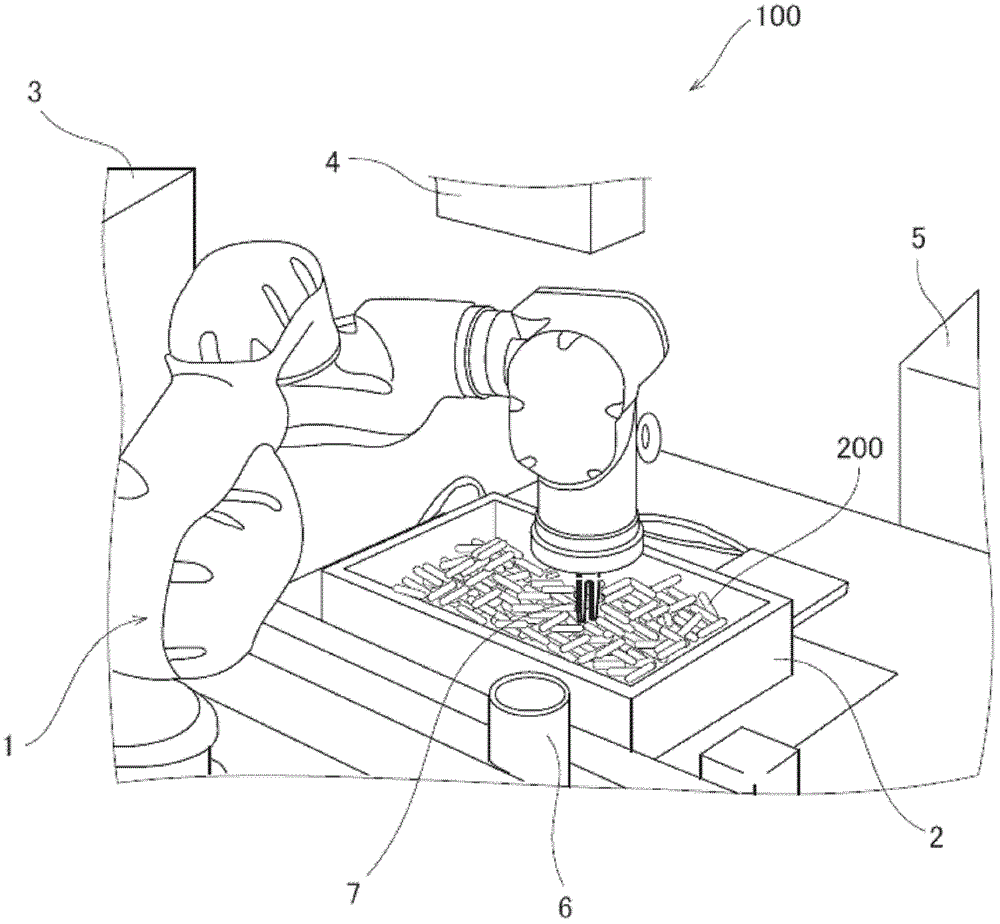
[0035] First, refer to figure 1 The overall configuration of the robot system 100 according to the first embodiment will be described.
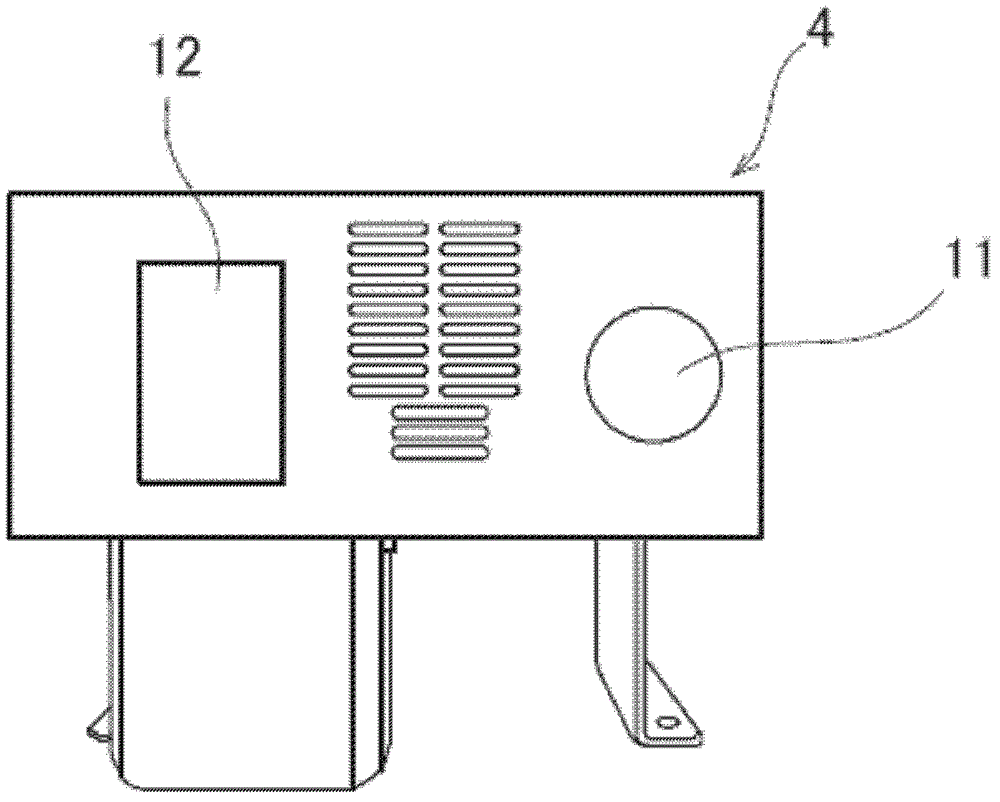
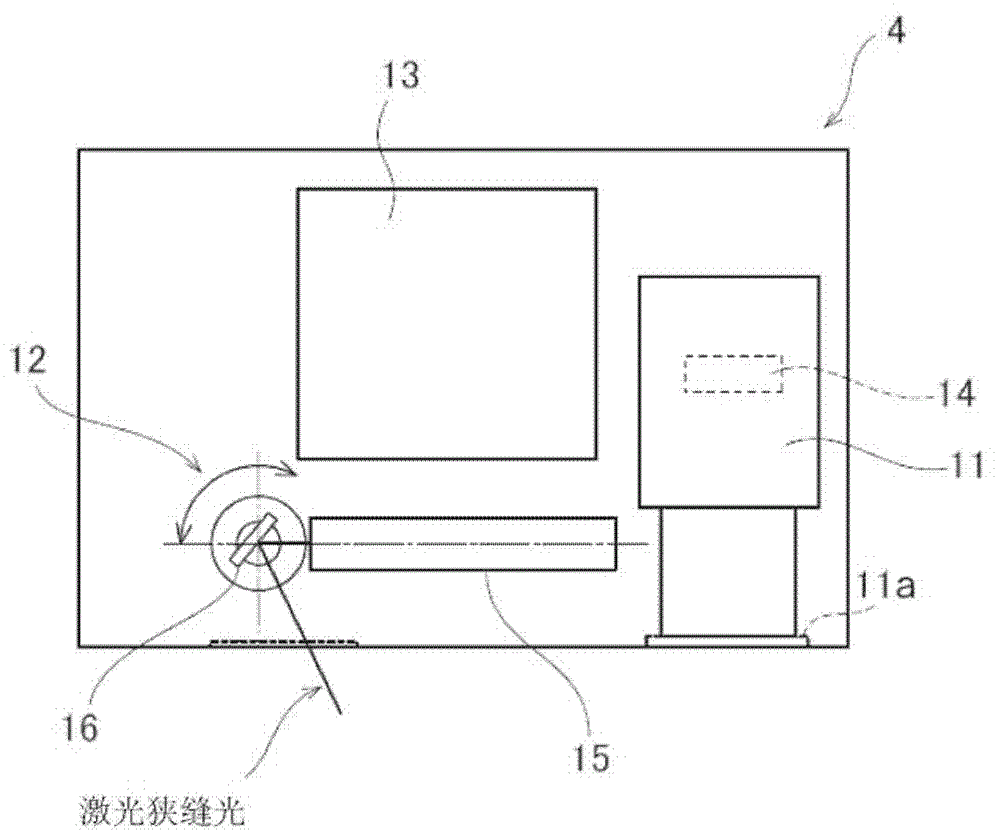
[0036] Such as figure 1 As shown, the robot system 100 is provided with: a robot 1 ; a stocker 2 ; a robot controller 3 ; a sensor unit (distance image sensor unit) 4 ; a user controller 5 ; In addition, the sensor unit 4 is an example of a "shape measuring device".
[0037] The stocker 2 is constituted by a box (tray) formed of resin or the like, and a plurality of workpieces 200 such as bolts, for example, are placed inside the stocker 2 . The robot 1 is a vertical articulated robot, and a hand device 7 for grasping the workpieces 200 placed in the stocker 2 one by one is provided on the top of the robot 1 . In addition, the hand device 7 is an example of a "grip". In addition, the workpiece 200 grasped by the hand device 7 is configured as follows, and is moved to the conveyance pallet 6 for conveying the workpiece 200 to the next proc...
no. 2 Embodiment approach
[0076] Below, refer to Figure 14 and Figure 15 The robot system 101 of the second embodiment will be described. In this second embodiment, unlike the first embodiment in which the workpiece 200 is directly placed on the surface 20 , the workpiece 200 is placed on the box-shaped tray 102 .
[0077] Such as Figure 14 and Figure 15 As shown, in the robot system 101 of the second embodiment, a plurality of workpieces 200 are placed on a box-shaped pallet 102 . In addition, other configurations of the second embodiment are the same as those of the above-mentioned first embodiment.
[0078] Below, refer to Figure 14 to Figure 20 The operation of the three-dimensional measurement by the sensor controller 13 of the second embodiment will be described.
[0079] First, before measuring the workpiece 200 three-dimensionally, as Figure 16 and Figure 17 As shown, in the state where the workpiece 200 is not placed on the tray 102, the tray 102, the surface 103 on which the tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More