

Non-concurrent axis symmetric two-rotation one-movement parallel mechanism with two-degree of freedom planar subchains
A planar sub-chain and degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve the problems of difficult processing and manufacturing, difficulty in ensuring accuracy, etc., and achieve easy processing accuracy, convenient processing and manufacturing, and broad application prospects Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
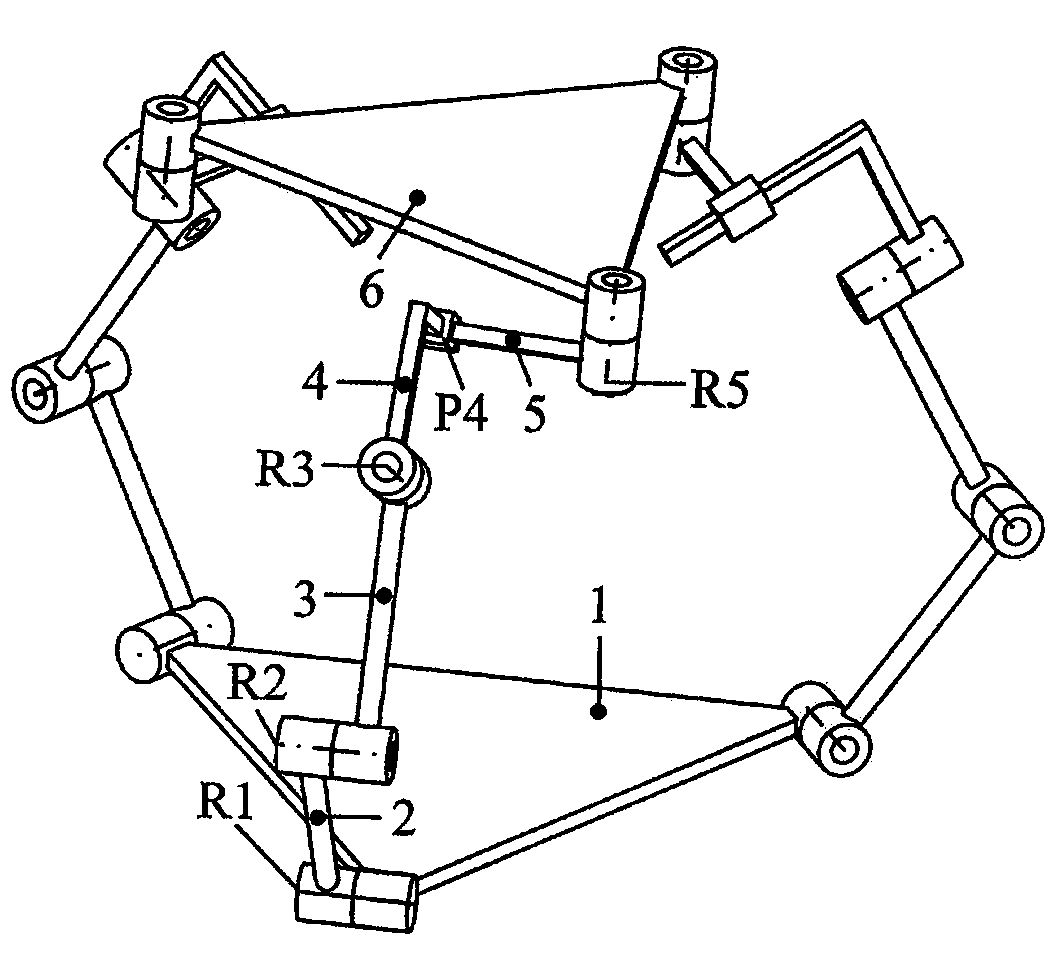
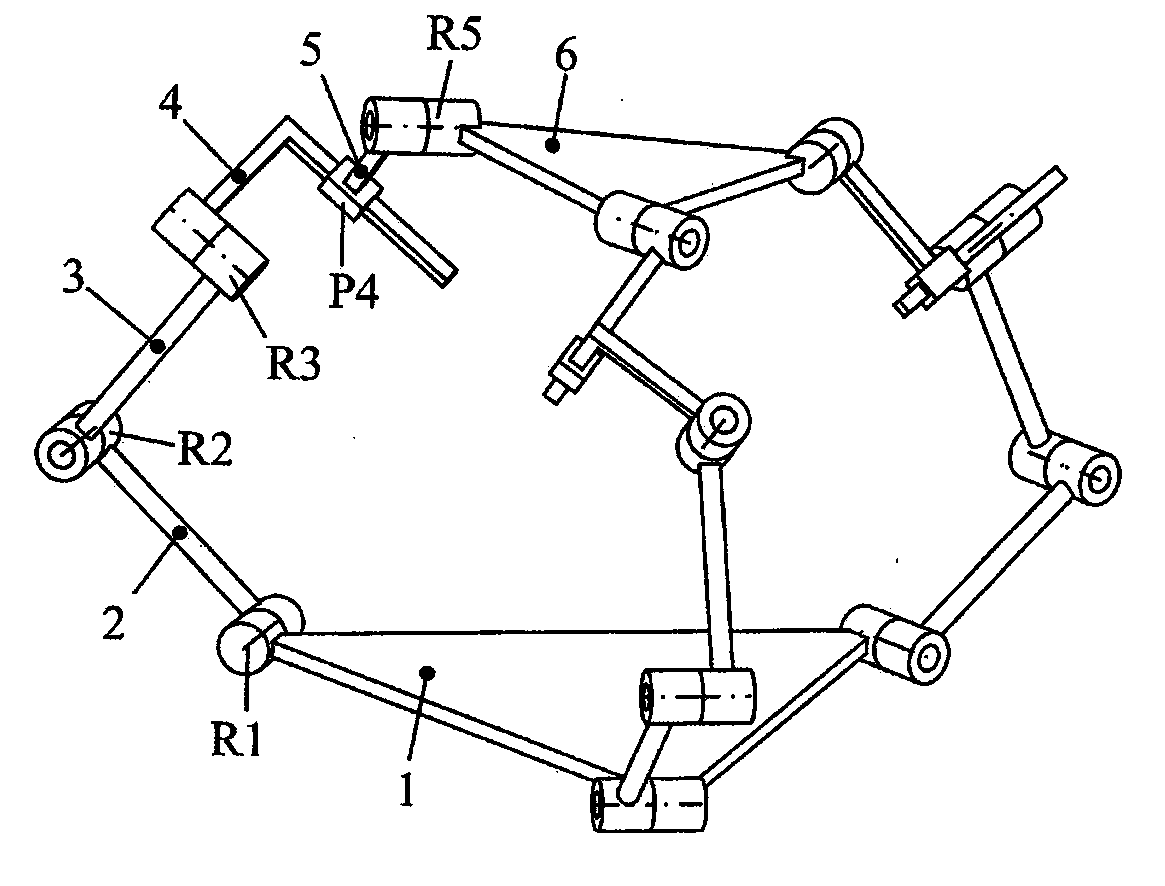
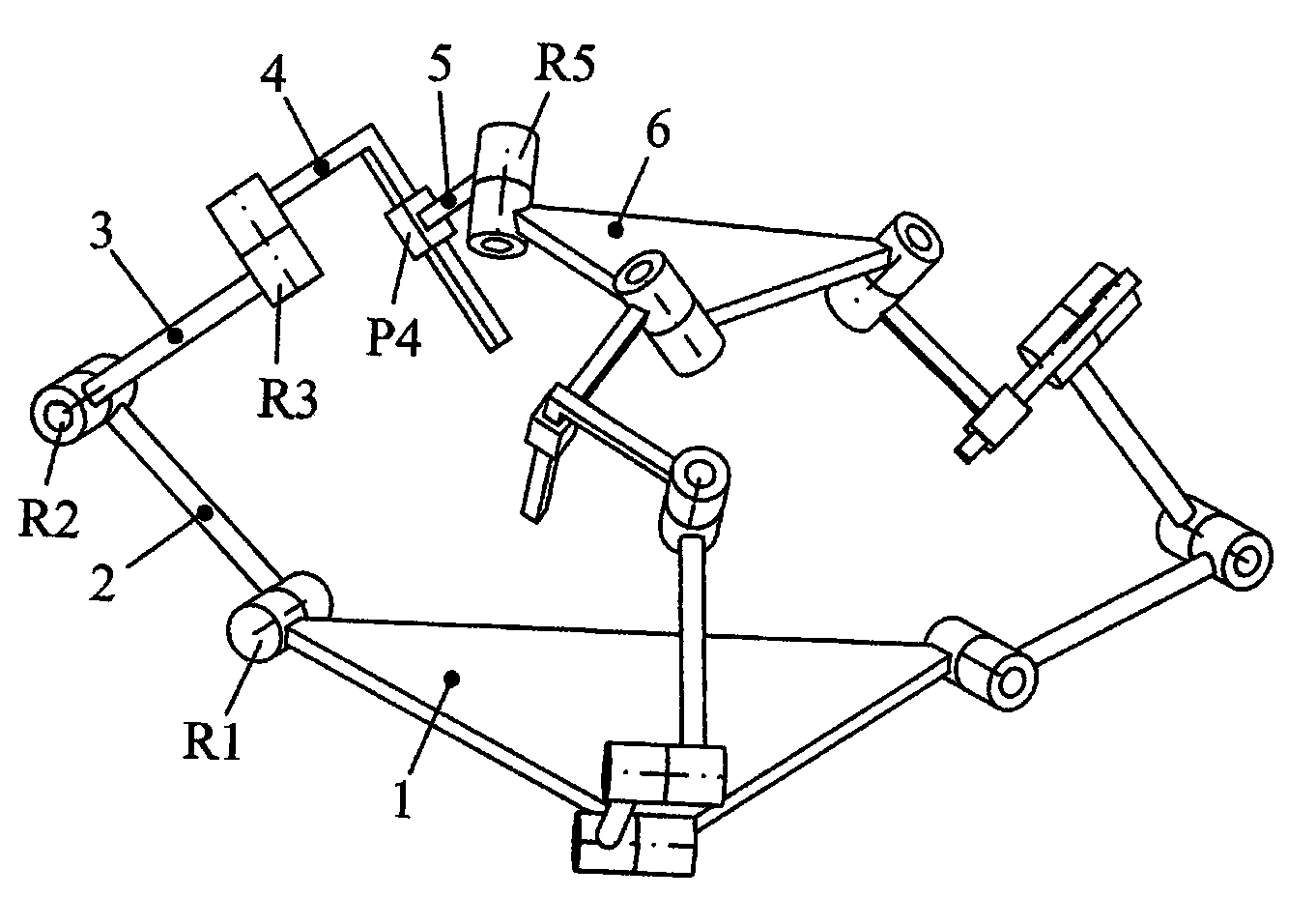
[0026] exist figure 2 In the three-dimensional schematic diagram of Embodiment 2 of the axisymmetric two-turn-one-shift parallel mechanism with two degrees of freedom planar sub-chains shown, the parallel mechanism is composed of a fixed platform 1, a moving platform 6 and three branches with identical structures , each branch starting from the fixed platform is a two-degree-of-freedom plane sub-chain connected with the fixed platform, an intermediate revolving pair R3, an intermediate moving pair P4, and a moving platform revolving pair R5 connected with the moving platform. The degree plane sub-chain is composed of two rotating pairs R1 and R2 whose axes are parallel to each other. The rotary pair R1 connects the fixed platform 1 and the connecting rod 2, and is arranged parallel to the fixed platform. Revolving pair R2 connects connecting rod 2 and connecting rod 3. The revolving pair R3 connects the connecting rod 3 and the connecting rod 4, and is perpendicular to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More