

Disturbing force compensating control device
A technology of compensating control and disturbance force, applied in the field of disturbance force compensation control device, which can solve the problems that the friction force between movable parts has a large influence and cannot be fully grasped
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] Next, an embodiment of the disturbance force compensation control device according to the present invention will be described with reference to the drawings.
[0081] (1. Structure of this embodiment)
[0082] (1-1. Structure of mechanical device)
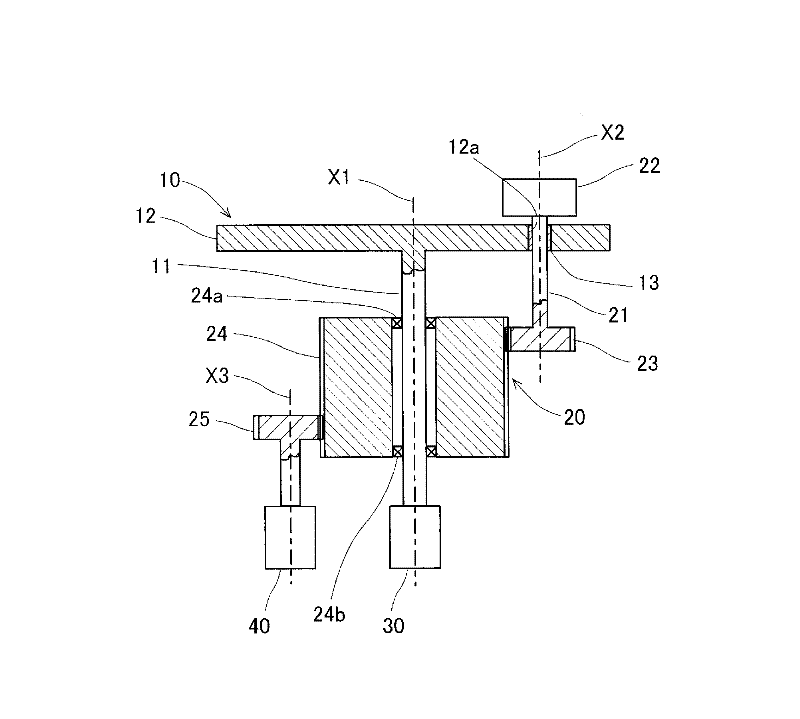
[0083] The disturbance force compensation control device of the present invention is a device for controlling a mechanical device described below. This mechanical device includes a plurality of movable parts and a plurality of actuators that drive the respective movable parts. Furthermore, this mechanical device has a structure in which a disturbing force acts on the operation of other movable parts due to the operation of each movable part. That is, when a certain movable part moves, this movement affects the movements of other movable parts.
[0084] As an example of this mechanism, such as figure 1 shown. For example, a head for picking up electronic parts in an electronic part mounter. Specifically, the mechanical ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More