

Route planning method for autonomous underwater vehicle aiming at undetermined mission time
A technology for underwater vehicle and route planning, applied in the direction of navigation calculation tools, etc., can solve problems such as undiscovered, achieve the effect of strong versatility, convenient use, and ensure global optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0023] The implementation steps of the embodiment of the present invention are:
[0024] 1. Coding the route planning problem
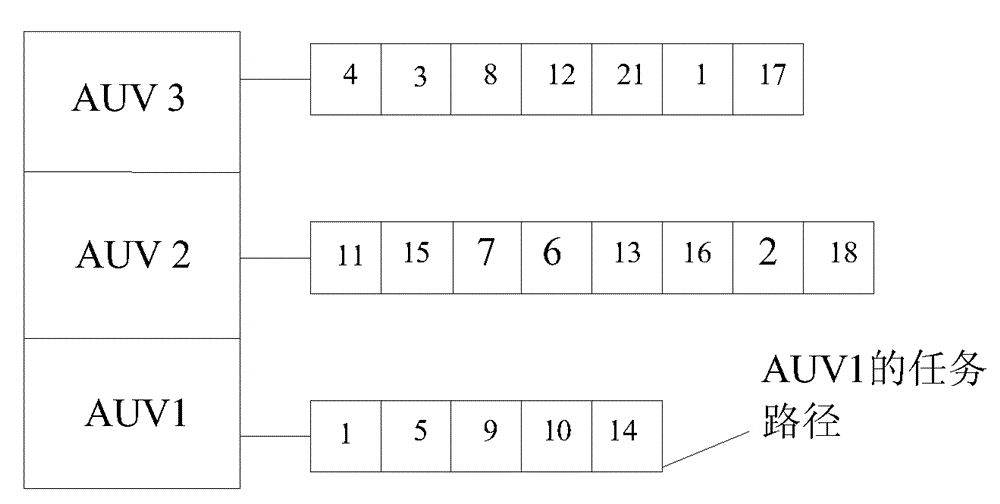
[0025] genetically coded as figure 1 shown. The coding of each feasible solution can be represented by multiple sub-coding sequences, each sub-coding sequence represents the waypoint order of one AUV, and the number of sub-coding sequences represents the number of AUVs required to sail all the waypoints.
[0026] 2. Generate initial population
[0027] For a population of size N, each individual will be randomly generated. Suppose there are N V AUVs participate in the task together. First, randomly generate N V [1, N V ] is a positive integer, as the number of waypoints that each aircraft needs to navigate. Then, determine the specific value of each waypoint and ensure that no waypoint duplication occurs.
[0028] 3. Population ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More