

Small track robot based on connecting rod mechanism
A crawler robot and link mechanism technology, applied in the field of robots, can solve the problems of difficult to achieve precise operation, small headroom, easy to be blocked, etc., to improve rigid positioning state and position accuracy, reduce motor load, The effect of strong obstacle crossing performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is described in more detail below in conjunction with accompanying drawing example:
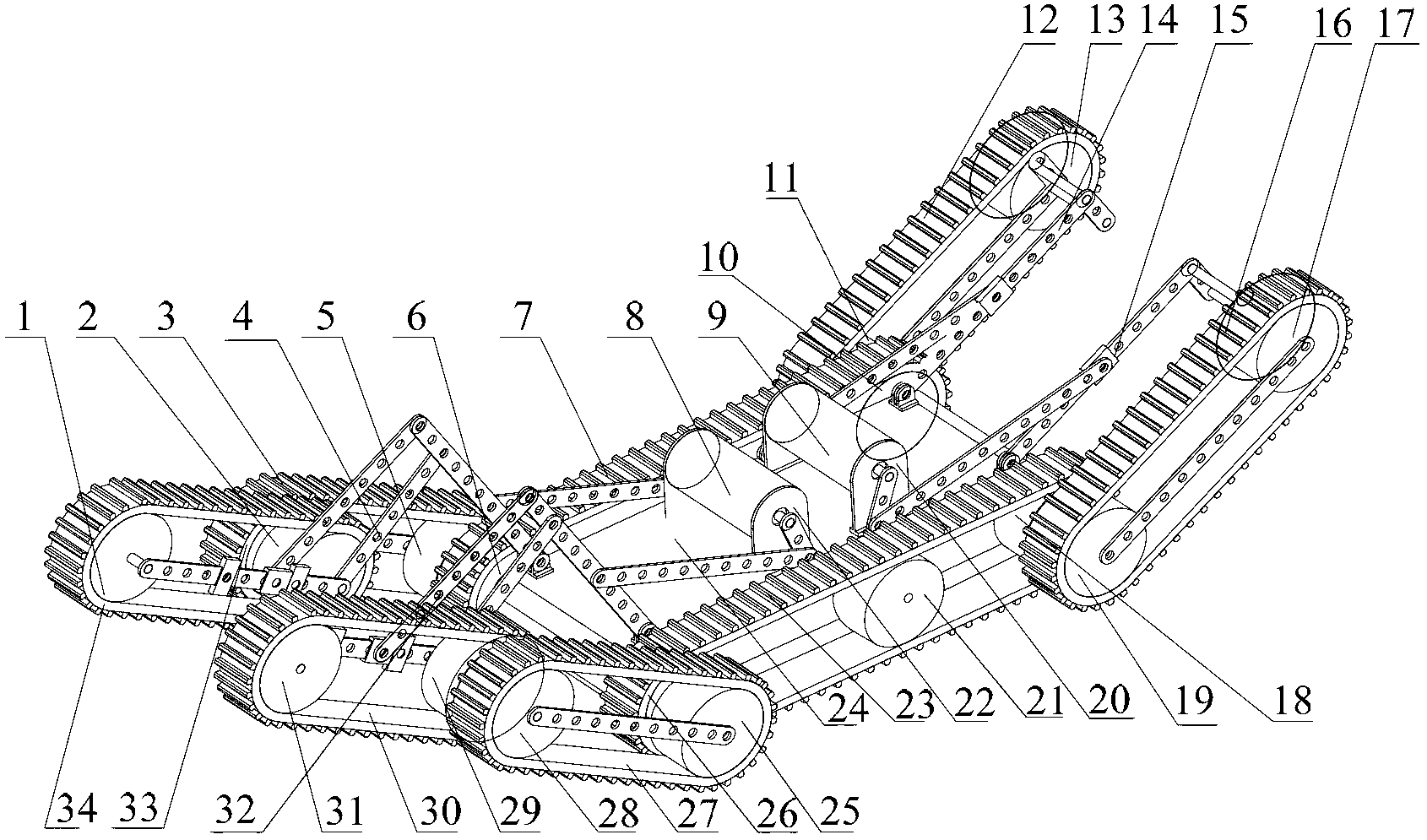
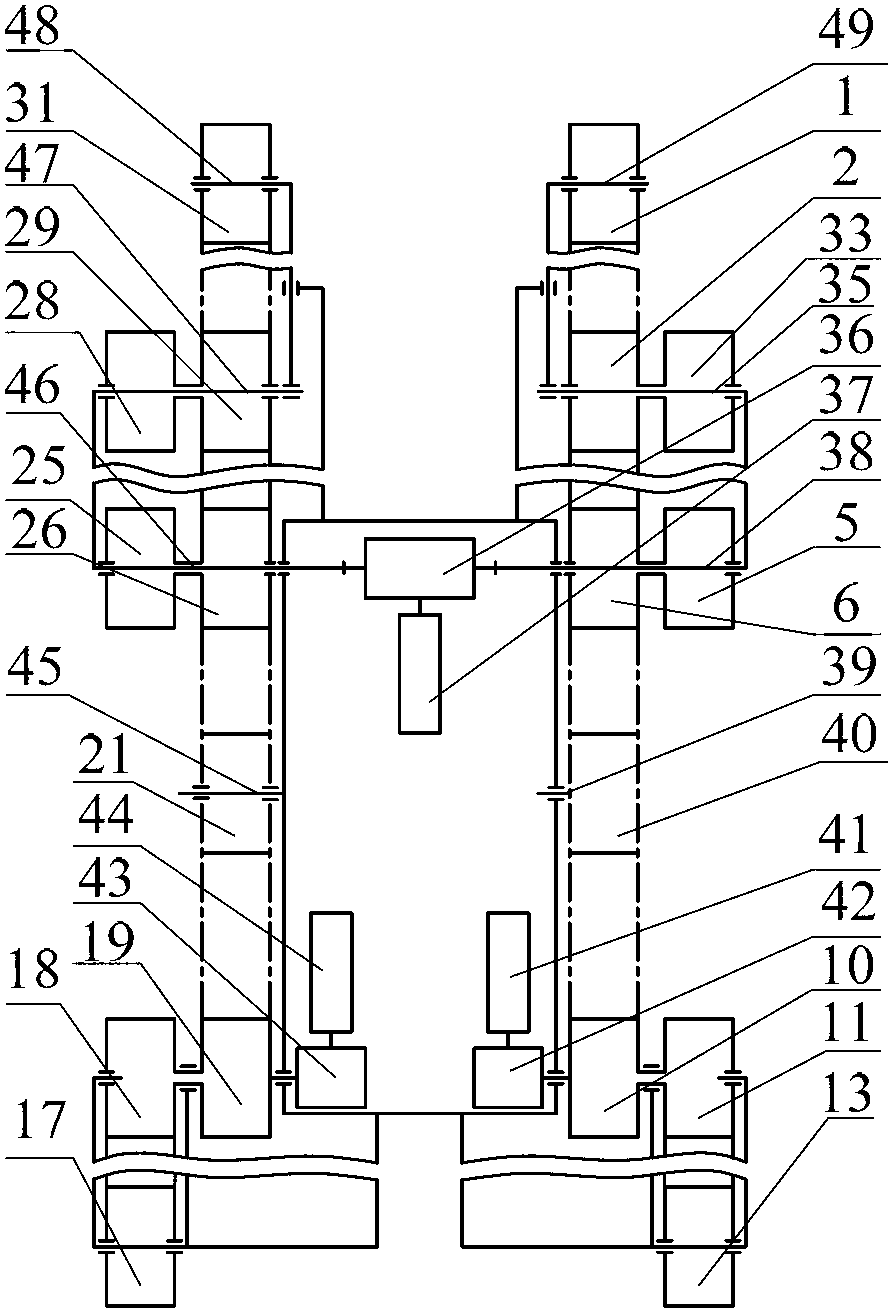
[0031] to combine Figure 1~1 2. Parts included in the present invention: the robot is mainly composed of rod groups 4, 14, 15, 32, track wheels 1, 2, 5, 6, 10, 11, 13, 17, 18, 19, 21, 25, 26, 28, 29, 31, 33, 40, crawler belts 3, 7, 12, 16, 23, 27, 30, 34, connecting rod motors 8, 9, 37, drive motors 41, 44, car body 24, etc.
[0032] On the side of the car body 24, see figure 1 , figure 2 : one end of the shaft VII48 is fixedly connected with one end of the connecting rod IV54 in the rod group IV32. One end of the shaft VI47 is connected and matched with the connecting rod IV54 and the connecting rod V55 in the rod group IV32, and the other end is connected and matched with one end of the connecting rod VI56. The crawler wheel XVI31 and the shaft VII are installed and matched for concentric asynchronous rotation. The track wheel XV29 is fixedly connected wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More