

Magnetorheological smart skin
A smart skin and magneto-rheological technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems that it is difficult to adapt to the requirements of grasping different objects, and the friction force cannot be adjusted.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The structure of the present invention is described in detail below in conjunction with accompanying drawing:
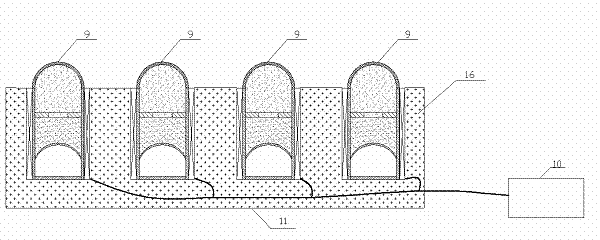
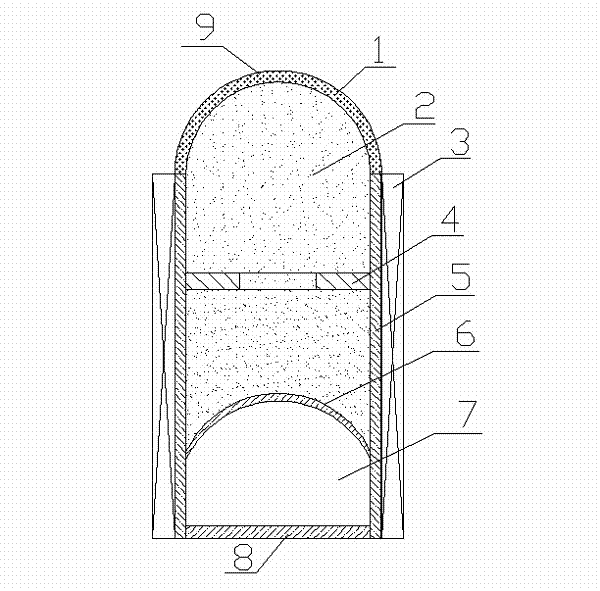
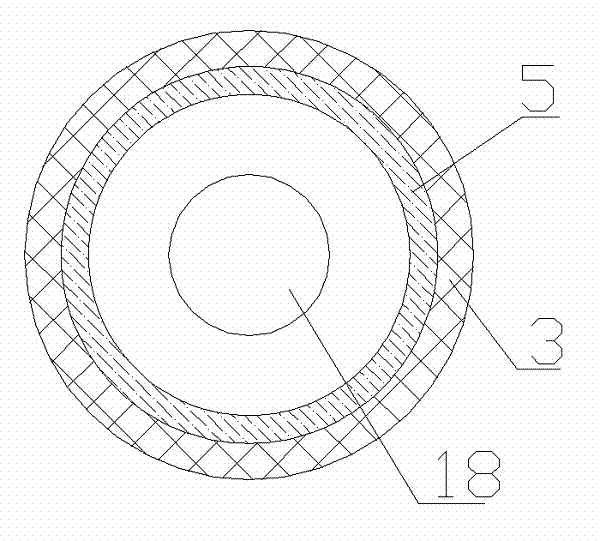
[0019] see Figure 1 to Figure 4 , which is a specific structure of the present invention, a magneto-rheological smart skin 16, which includes a working unit 9 and a flat pad 11, wherein: the working unit 9 is composed of a cylinder 5, a bottom plate 8, an orifice plate 4, a spherical shell 1 , elastic membrane 6 and excitation coil or electromagnet 3, the spherical shell 1 is fixed on the upper end of the cylinder 5, the bottom plate 8 is fixed on the lower end of the cylinder 5, the elastic membrane 6 is fixed on the middle and lower part of the cylinder 5, the orifice plate 4 Fixed in the cylinder 5 between the spherical shell 1 and the elastic membrane 6, the excitation coil or electromagnet 3 is fixed on the outer circumference of the cylinder 5, the cylinder 5, the bottom plate 8, the elastic membrane 6 and the spherical shell 1 are made of polymer The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More