

Multiple-unmanned aerial vehicle collaborative area searching method under communication constrains
A multi-UAV and area search technology, which is applied in the direction of target-finding control, navigation computing tools, etc., can solve the problems of insufficient research on communication constraints, vague concepts, and failure to consider communication constraints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
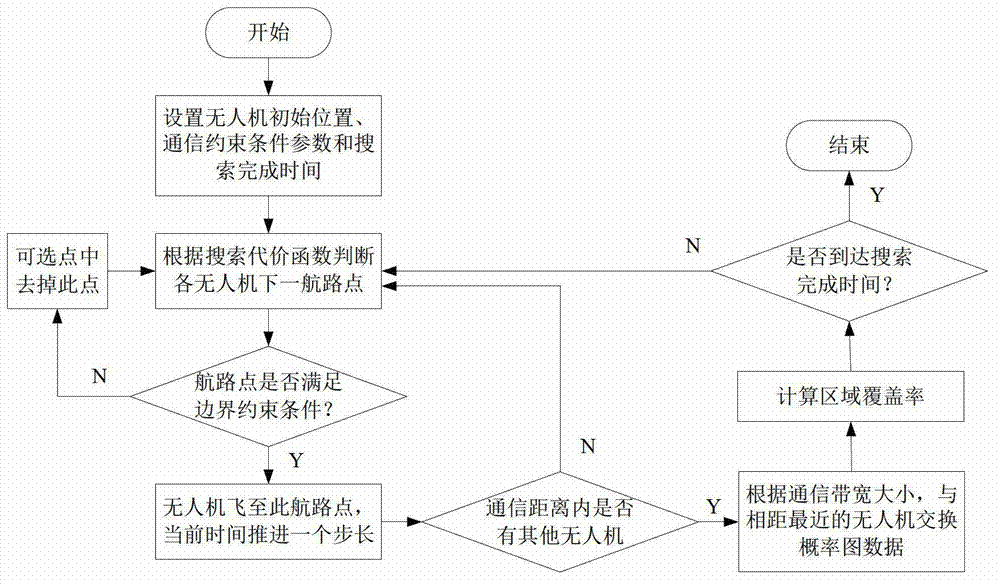
[0031] Suppose the current time is t, the search start time is t=0, and the search completion time is t 0 . The UAVs participating in the collaborative area search are of the same type, the communication distance of UAV communication equipment is D, and the communication bandwidth is b. The steps performed by the algorithm are as follows (see attached figure 1 ):
[0032] Step 1: Set the initial position of the multi-UAV, the parameters of the communication constraints and the search completion time.
[0033] The initial position of the UAV is (x i ,y i )(i=1,2,…,n), where n is the number of drones;
[0034] The parameters of the communication constraints are: the communication distance is D, and the communication bandwidth is b;
[0035] The search completes in time t 0 .
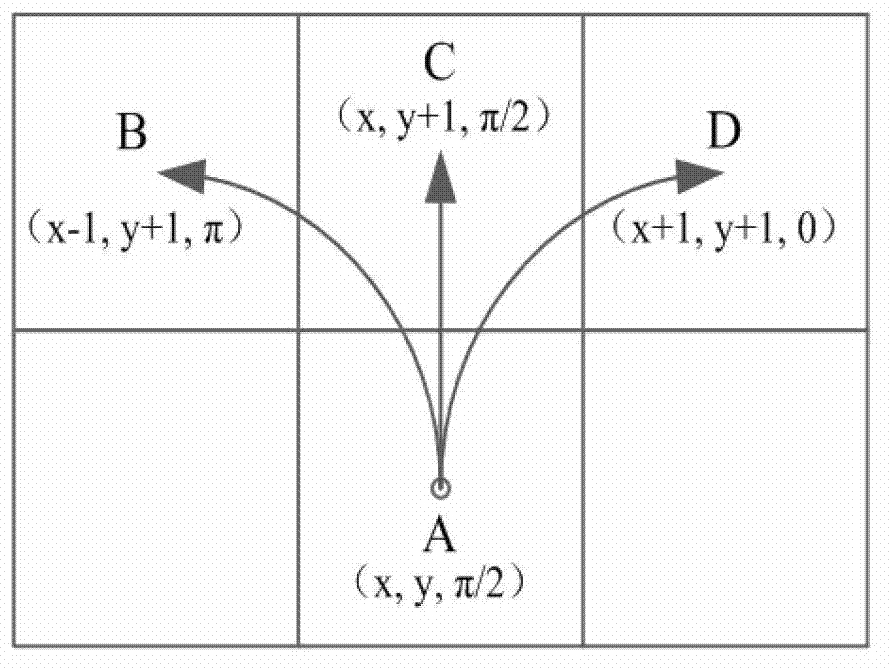
[0036] Step 2: Interpret the next waypoint position of each UAV accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More