

Gear oscillating bar type pneumatic spider robot
A technology of spider robots and gears, applied in the field of bionic robots, can solve the problems of restricted crawling speed, poor obstacle-surmounting ability, and high terrain sensitivity, and achieve super-strong obstacle-surmounting ability, low manufacturing cost, and easy promotion and application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
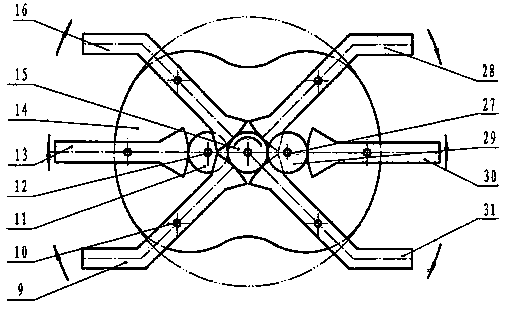
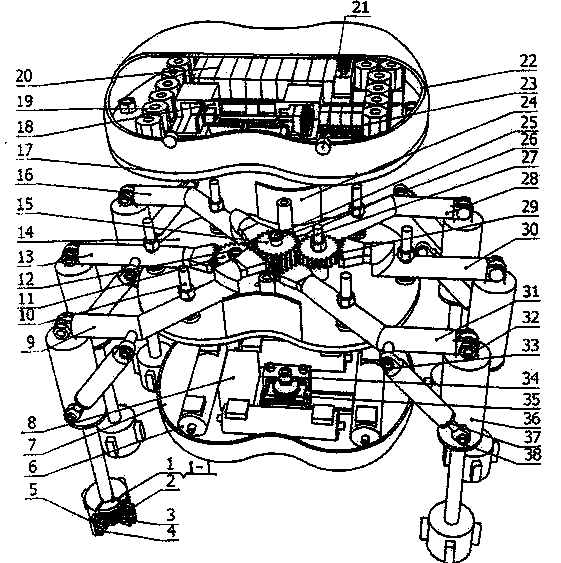
[0013] Example. Refer to attached Figure 1~4 , the gear pendulum type pneumatic spider robot is to be provided with central shaft 25 in the middle of lower base plate 14, on central shaft 25 with key dress drive gear 15, bearing 26 is housed on central shaft 25. Drive gear 15 is symmetrically staggeredly meshed to connect direction-changing gear one 11 and direction-changing gear two 29, and driving gear 15 is also meshed to connect symmetrical gear fork one 9, gear fork three 16, gear fork four 28, and gear fork six. 31, wherein the meshing position of driving gear 15 and reversing gear one 11, gear pendulum bar four 28, gear pendulum bar six 31 is in the lower horizontal plane, and driving gear 15 and reversing gear two 29, gear pendulum bar one 9, gear pendulum The engagement position of bar three 16 is in the upper horizontal plane. Reversing gear one 11 and reversing gear two 29 are contained in respectively on reversing gear shaft one 12, reversing gear shaft two 27, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More