

Pulling-rope positioning and control method, device and system
A technology of positioning control and pose information, applied to mechanically driven excavators/dredgers, etc., can solve problems such as large installation errors, heavy workload, and low work efficiency, and achieve improved test accuracy, accurate anchoring positions, and reduced effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
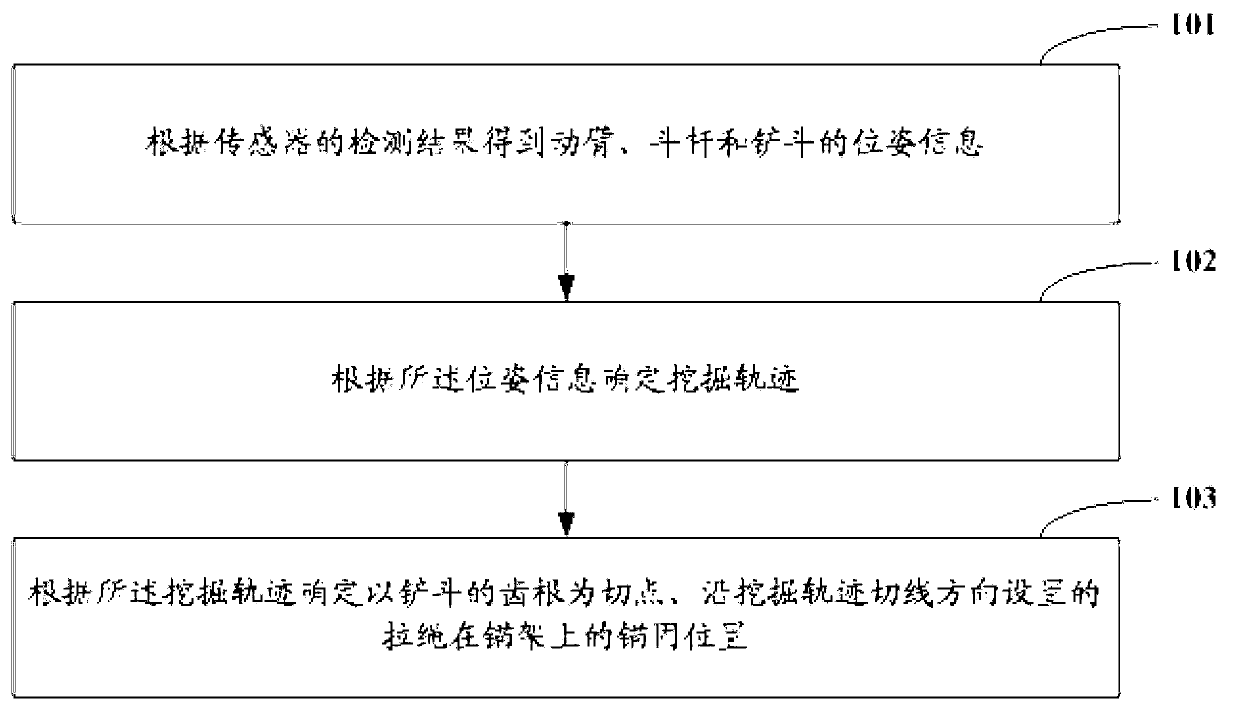
[0027] In order to improve the test accuracy of the digging force test of the excavator, the present invention provides a pull rope positioning control method, device and system applied to the digging force test of the excavator. The position and orientation information of the pole and bucket, the control device determines the excavation trajectory according to the position and orientation information, and finally obtains the anchoring position of the stay rope on the anchor frame. The determination of the anchoring position is relatively accurate, which greatly improves the test accuracy of the excavation force test. In order to make the purpose, technical solution and advantages of the present invention clearer, the following specific examples are given to further describe the present invention in detail.
[0028] Such as figure 1 As shown, the present invention is applied to an embodiment of the stay rope positioning control method for excavator excavation force testing, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More