

S-shaped curve based method for control track of shield tunneling machine
A trajectory control and shield machine technology, which is applied in earthwork drilling, mining equipment, tunnels, etc., can solve problems such as difficulty in implementation, low sensitivity, and inability to ensure that the posture of the shield machine is completely consistent with the design axis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
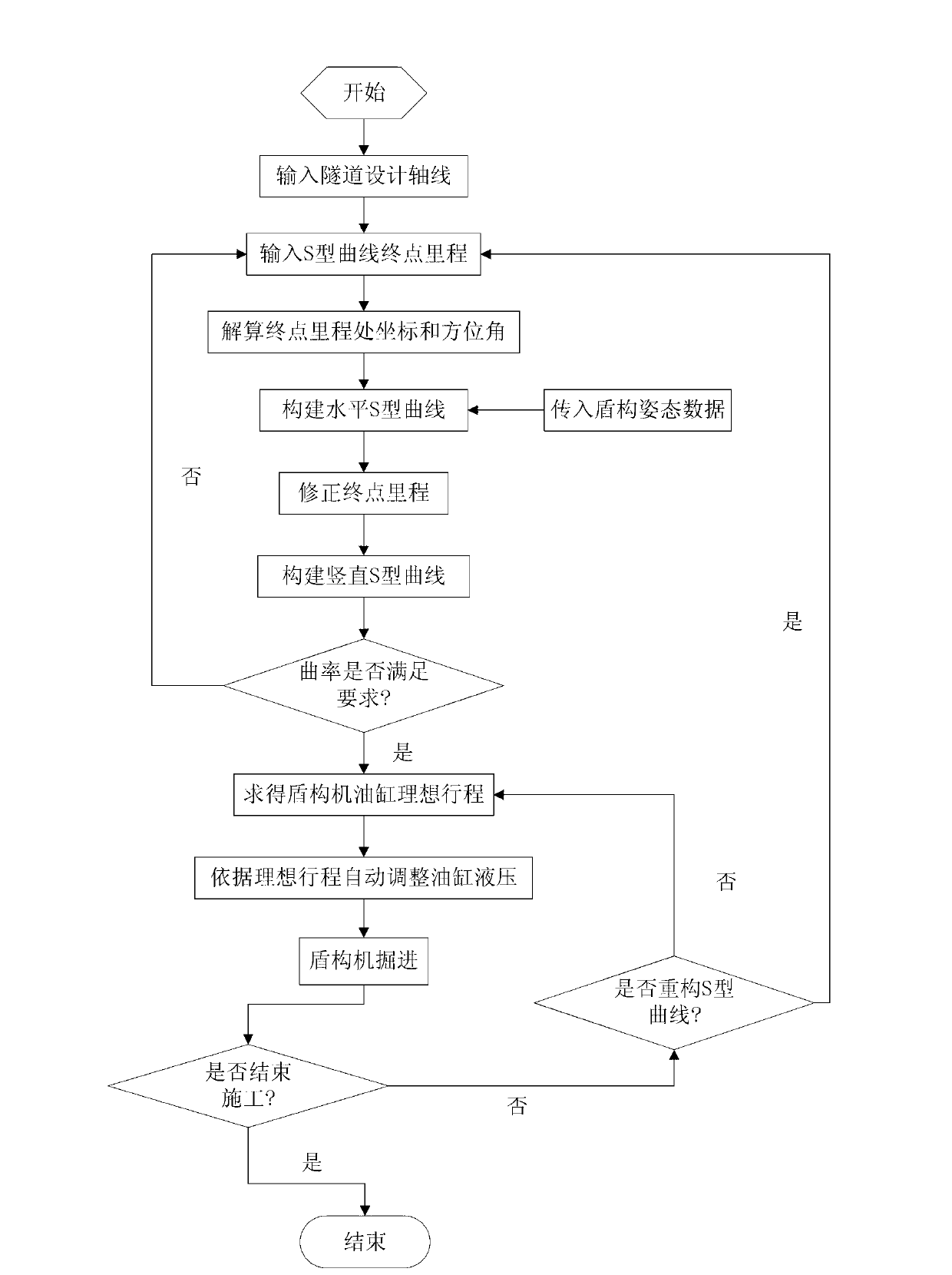
[0061] like figure 1 As shown, a shield machine trajectory control method based on S-curve, the method includes the following steps:
[0062] 1) The computer obtains the horizontal and vertical curve elements of the tunnel design axis, and discretizes them into end-to-end line elements, and the line elements include straight lines, transitional curves and circular curves. Described discretization into end-to-end line elements refers to obtaining the basic parameters of each line element and the mileage of each line element starting point and end point; for straight line elements, its basic parameters include starting point coordinates and end point coordinates; for transitional curves Its basic parameters include starting point coordinates, starting point azimuth, clothoid parameters, curve length and type; for circular curves, its basic parameters include circle center coordinates, starting angle, end point angle and arc radius.
[0063] 2) The computer obtains the initially...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More