Fast recognition method for positioning mark point of mobile robot in indoor environment
A mobile robot, indoor environment technology, applied in the field of computer vision, can solve the problem that the positioning technology is not easy to expand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The method of the present invention has no specific requirements on the performance of the camera, and a general network camera is sufficient.
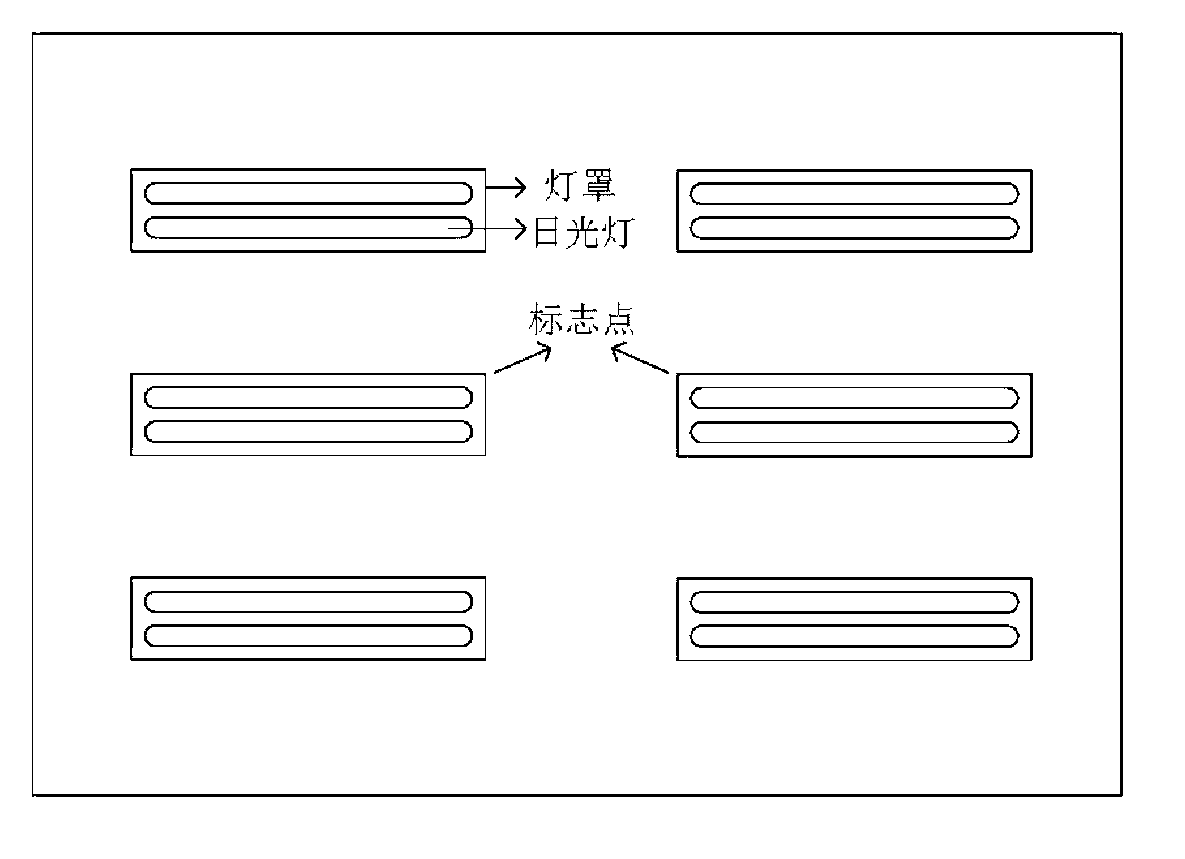
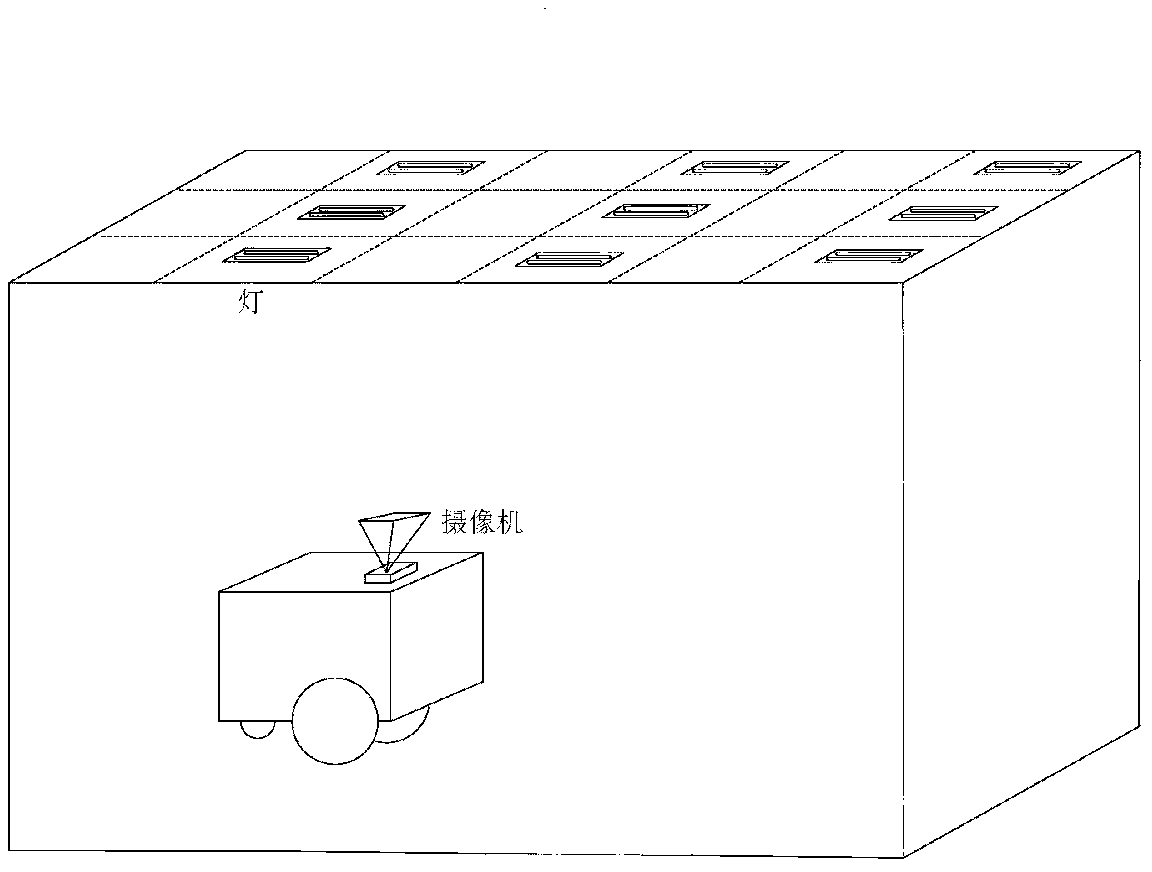
[0035] In step 1, the camera installation requirement is that the imaging plane is parallel to the ceiling plane. During the actual operation, a square marker can be pasted on the ceiling. Move the robot under the square marker so that the square marker is exactly near the center of the image. Determine whether the camera is parallel to the ceiling by identifying the length of each side of the square in the image. Let the pixel length of each side of the square be l i , then when Satisfied|(l i -l j ) / (l i , +l j )|<ε, it is considered that the optical axis of the camera is perpendicular to the ceiling. The value of ε can be taken as ε≤0.1. The requirements for camera installation can be met through repeated debugging. In practical applications, it is recommended to use a PTZ camera.
[0036] In step 2, it is necess...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More