

Robot grinding system based on feedback of sensor
A robot and grinding technology, which is applied to the parts of grinding machine tools, grinding/polishing equipment, grinding machines, etc., can solve the problems of unable to correct the workpiece position offset, unable to achieve the predetermined amount of workpiece modification, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
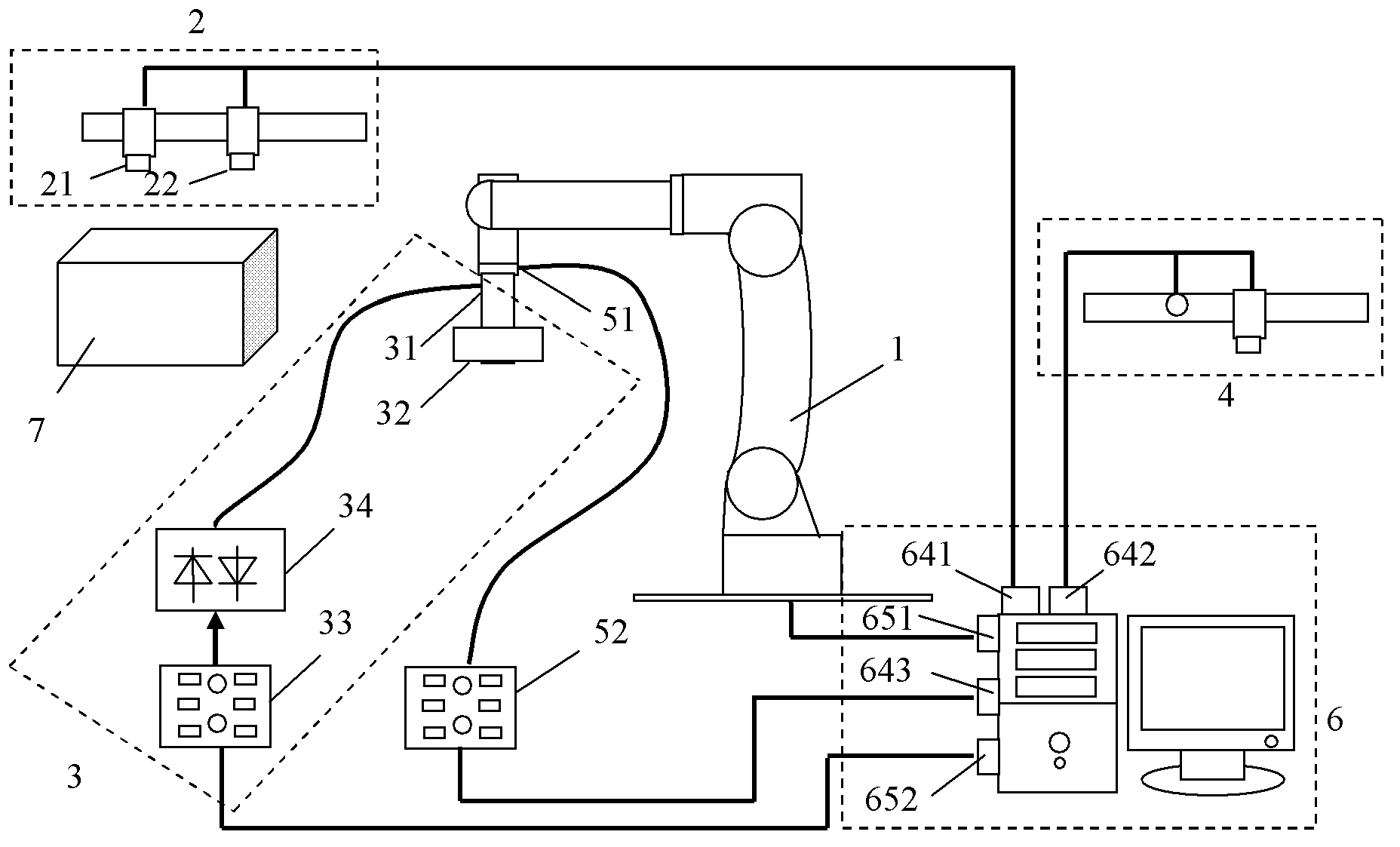
[0021] figure 1 It is a structural schematic diagram of an embodiment of the robot grinding system based on force feedback of the present invention. Such as figure 1 As shown, the system is used for grinding a workpiece 7, and the system includes a robot 1, a workpiece contour detection unit 2, an electric spindle unit 3, a grinding wheel wear detection unit 4, a grinding force detection unit 5 and a system control host 6.
[0022] Wherein, the robot 1 is used for installing the electric spindle unit 3 and controlling the electric spindle unit 3 to perform translation so as to reach a predetermined position for grinding the workpiece 7 . The robot 1 may adopt an existing robot, such as the robot IRB4400 of ABB Company. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More