

Pneumatic muscle driving type two-freedom-degree ankle recovery parallel robot
A technology of pneumatic muscles and degrees of freedom, applied in muscle training equipment, passive exercise equipment, sports accessories, etc., can solve problems such as feeling uncomfortable, achieve the effect of reducing friction, solving feeling discomfort and even pain, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
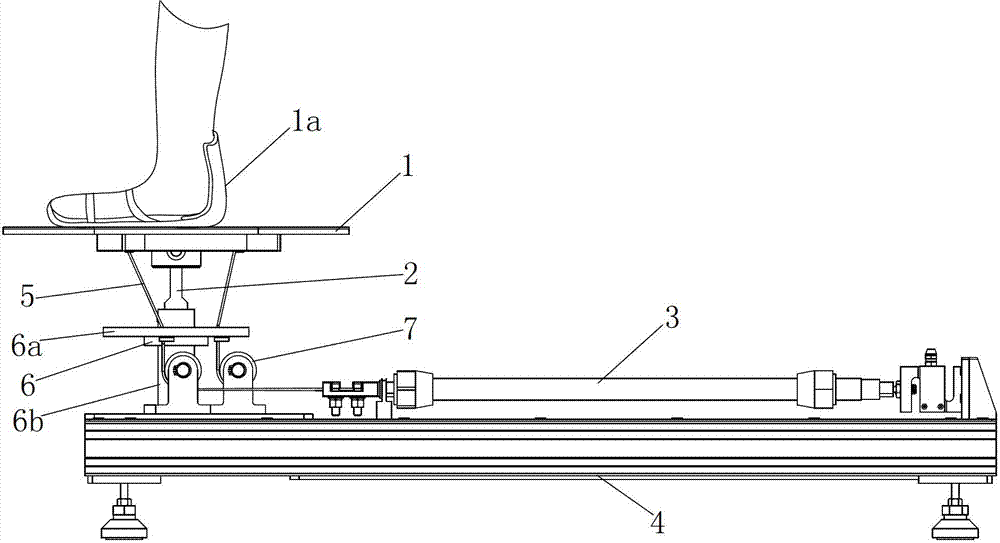
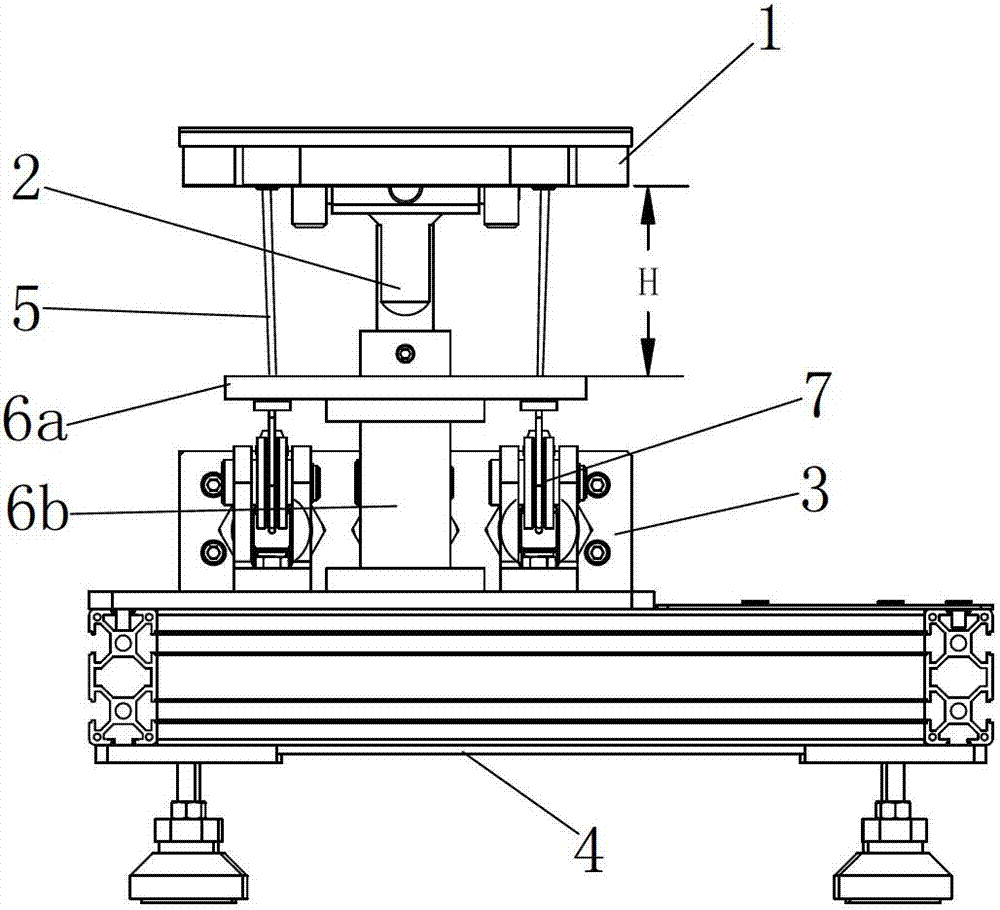
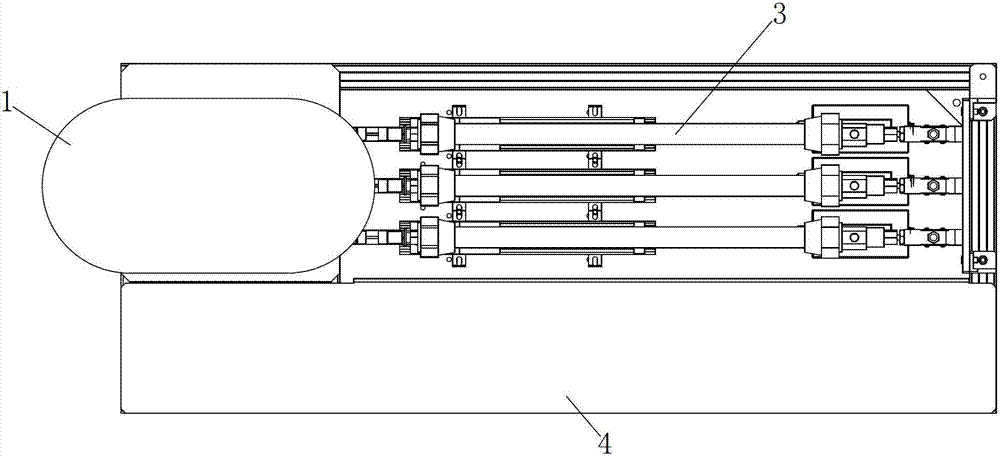
[0026] Such as figure 1 A pneumatic muscle-driven two-degree-of-freedom ankle rehabilitation parallel robot is shown, including a moving platform 1 with a foot cover 1a, a rotating mechanism 2, a driving mechanism 3 and a bracket 4, and the moving platform 1 is movably installed through the rotating mechanism 2 On the bracket 4 , the driving mechanism 3 is a pneumatic muscle, the pneumatic muscle is installed on the bracket 4 , and the movable end of the pneumatic muscle is connected with the dynamic platform 1 through a flexible cable 5 . By replacing the rigid driver of the traditional robot with a pneumatic muscle, and then cooperating with the soft cable 5 to transmit power, the problem of discomfort or even pain in the recovery process of the patient is solved, which is beneficial to the patient's recovery, and the pneumatic muscle is light in weight and easy to use. The pneumatic muscle is installed horizontally on the support 4 .
[0027] A flexible cable guiding and p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More