

Signal processing method and device
A technology of signal processing and depth information, applied in image communication, optics, instruments, etc., can solve problems such as large parallax
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0087] Taking the conventional 7-viewpoint grating stereoscopic display device as an example, N=7.
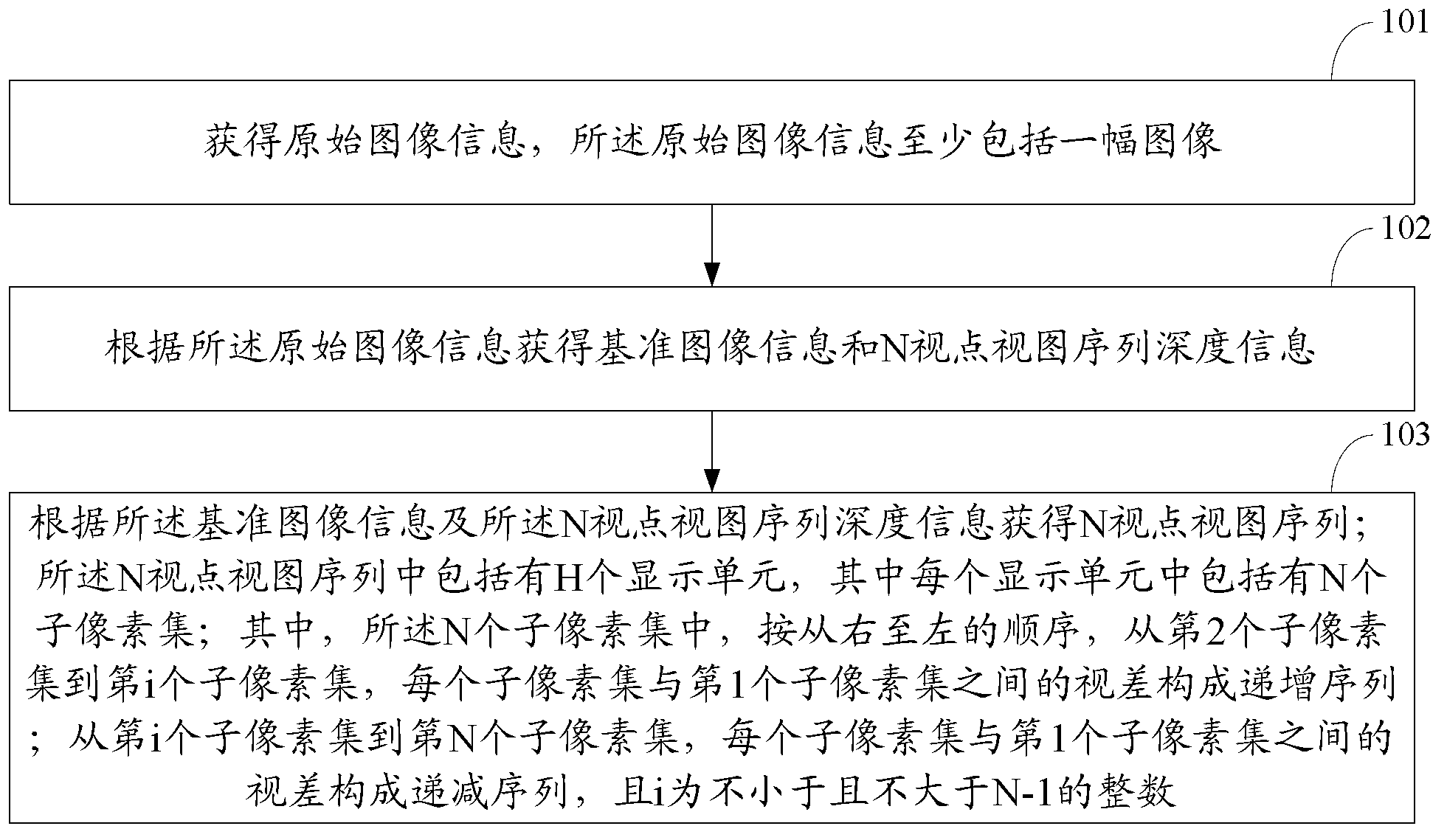
[0088] When the original image signal is 7-viewpoint naked-view image information, the device extracts a 2D image from the original image signal, and uses the extracted 2D image signal as reference image information. In addition, the display device also needs to acquire the depth information of the N-viewpoint view sequence. Wherein, when acquiring the depth information of the N-viewpoint view sequence, the acquisition may be performed with reference to content between sub-pictures in the original image signal.
[0089] After extracting the reference image information and obtaining the depth information of the N-viewpoint view sequence, the 3D sub-images of each viewpoint in the N-viewpoint can be synthesized according to the reference image information and the depth information of the N-viewpoint view sequence, so that the N viewpoint view sequence.
[0090] In this embodime...
Embodiment 2
[0104] Taking an 8-viewpoint grating stereoscopic display device as an example, that is, N=8.
[0105]When the original image signal is 8-viewpoint naked-view image information, the device extracts a 2D image from the original image signal, and uses the extracted 2D image signal as reference image information. In addition, the device also needs to acquire the depth information of the N-viewpoint view sequence. Wherein, when acquiring the depth information of the N-viewpoint view sequence, the acquisition may be performed with reference to an arrangement manner among sub-pictures in the original image signal.
[0106] After extracting the reference image information and obtaining the depth information of the N-viewpoint view sequence, the 3D sub-images of each viewpoint in the N-viewpoint can be synthesized according to the reference image information and the depth information of the N-viewpoint view sequence, so that the N viewpoint view sequence.
[0107] In this embodiment...
Embodiment 3
[0121] In this embodiment, the original image information is a 2D image signal, from which reference image information is extracted, and the depth information of the N-viewpoint view sequence is obtained according to the original image information and a corresponding algorithm, and according to the reference image information and the obtained The depth information of the N-viewpoint view sequence is synthesized into 3D sub-images of each viewpoint in the N-viewpoint, so that the N-viewpoint view sequence can be obtained.
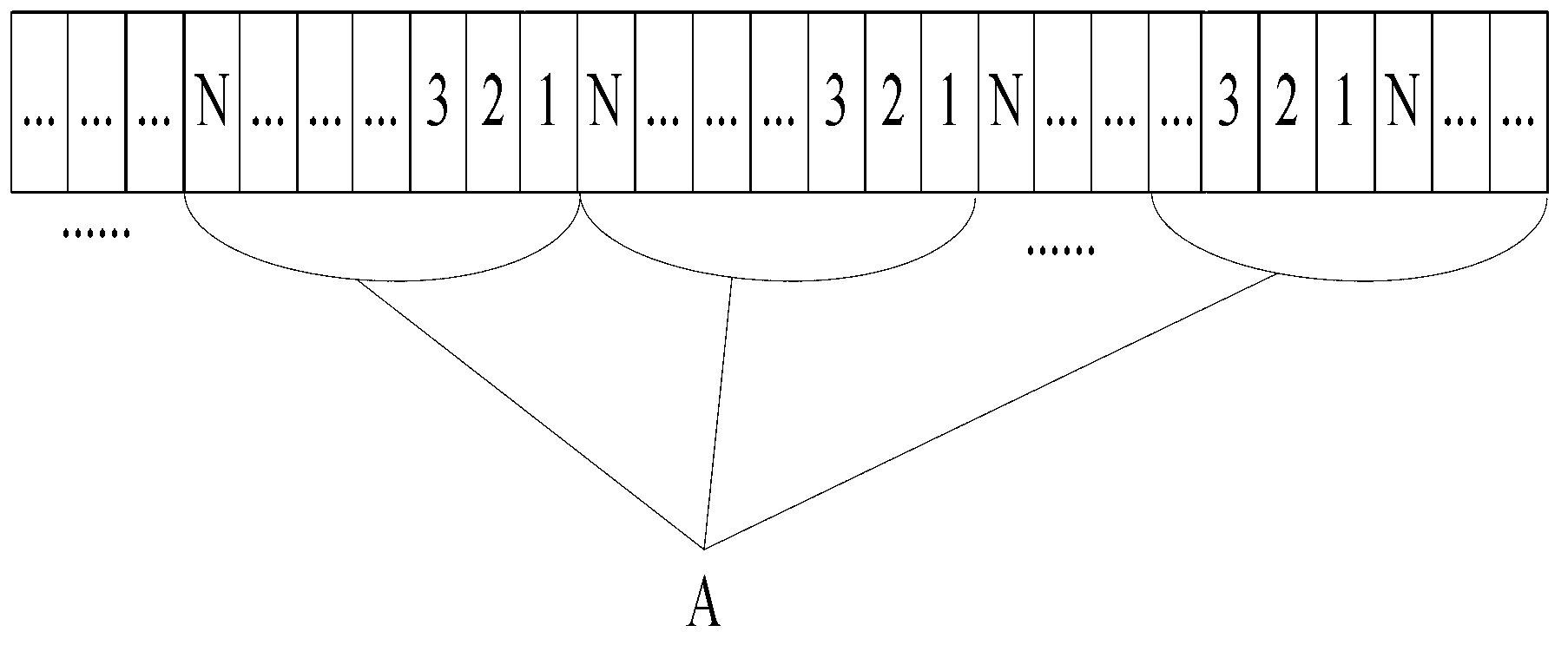
[0122] In this embodiment, the view sequence of N viewpoints may include H display units, wherein each display unit may include N sub-pixel sets, wherein, in the N sub-pixel sets in one display unit, according to In order from right to left, from the second sub-pixel set to the i-th sub-pixel set, the disparity between each sub-pixel set and the first sub-pixel set constitutes an increasing sequence, from the i-th sub-pixel set to the N-th sub-pixel set , th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More