

Method using improved regularization method to restrain difference global positioning system (DGPS) integer ambiguity ill-condition
A whole-circle ambiguity, ill-conditioned technology, applied in the direction of satellite radio beacon positioning system, measuring device, instrument, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0046] The method of the present invention first uses the integer least squares to solve the floating-point solution of the observation equation, and then introduces the improved regularization method into the suppression of the ill-conditionedness of the integer ambiguity, so that the ill-conditionedness in the process of solving the DGPS integer ambiguity can be eliminated. Improvement can obtain a stable solution to the ambiguity of the whole circle, so that it is more accurate when using DGPS for high-precision positioning and attitude measurement.
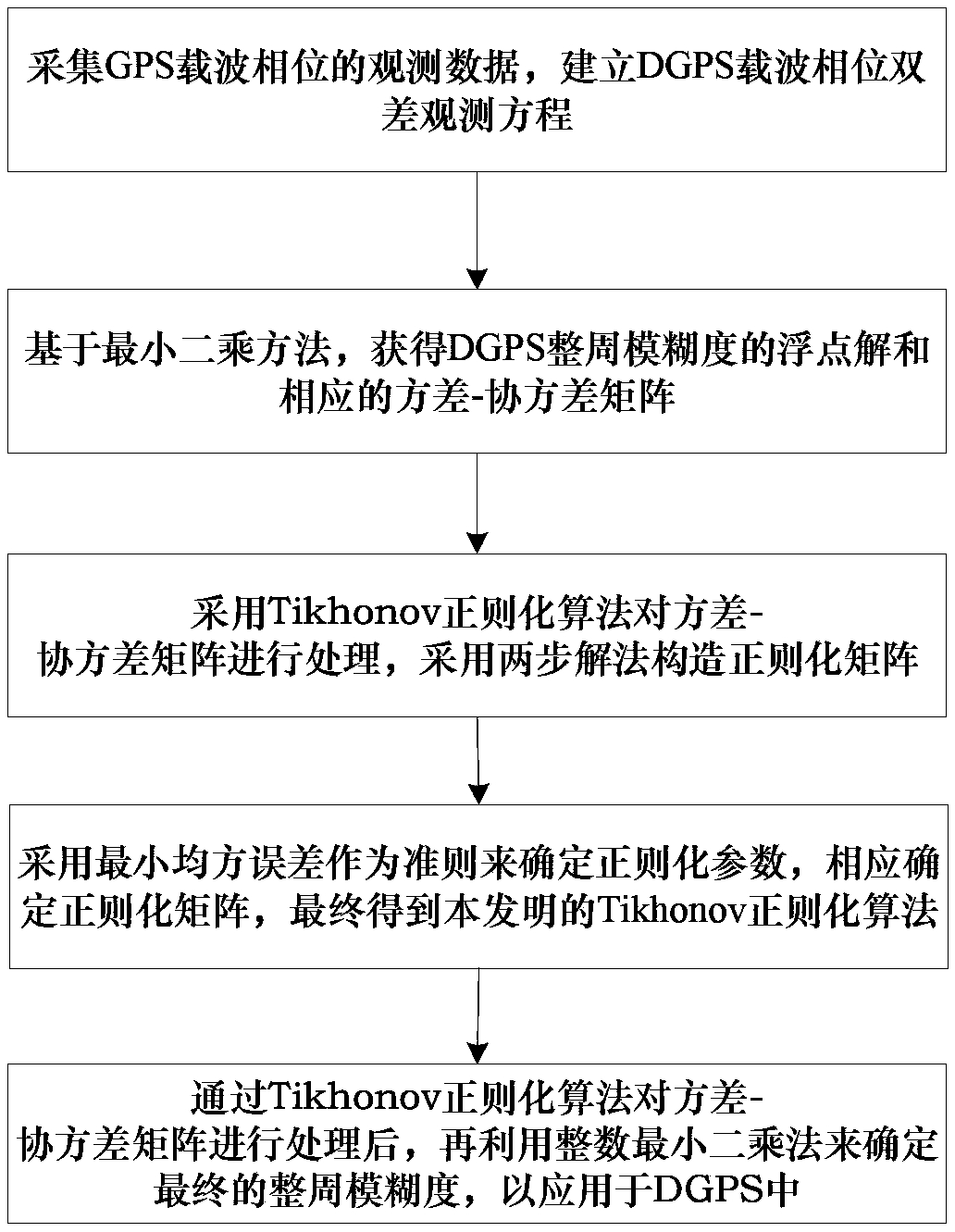
[0047] The present invention is a kind of method that adopts improved regularization method to suppress the ill-conditionedness of DGPS integer ambiguity, such as figure 1 As shown, each step is described in detail as follows.
[0048] Step 1: collect observation data of GPS carrier phas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More