Ground wire patrol checking robot of high voltage power line
A technology of high-voltage transmission lines and inspection robots, which is applied in the direction of instruments, manipulators, and signal transmission systems, can solve problems such as uncertain workloads, and achieve the effects of compact structure design, convenient operation, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
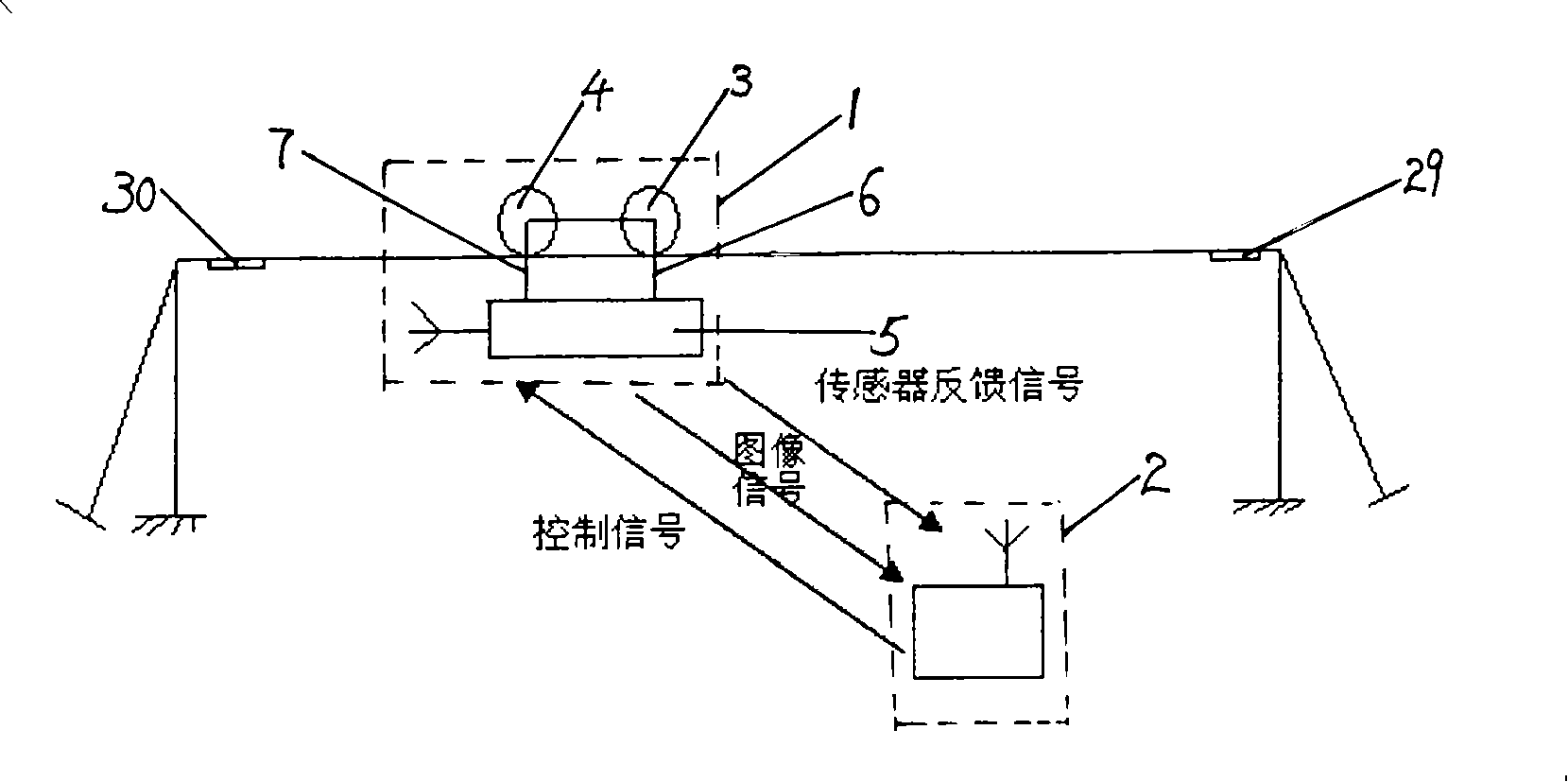
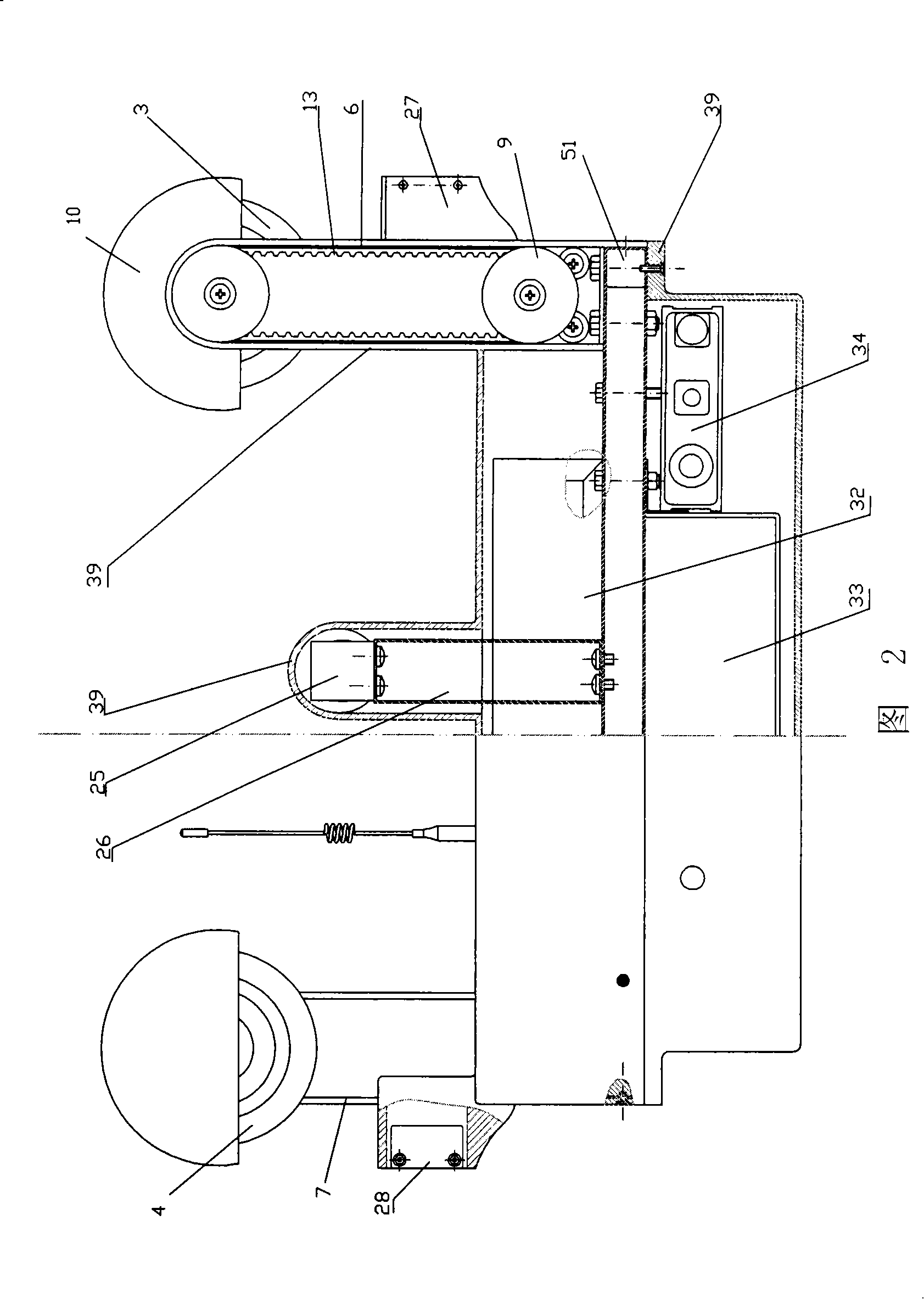
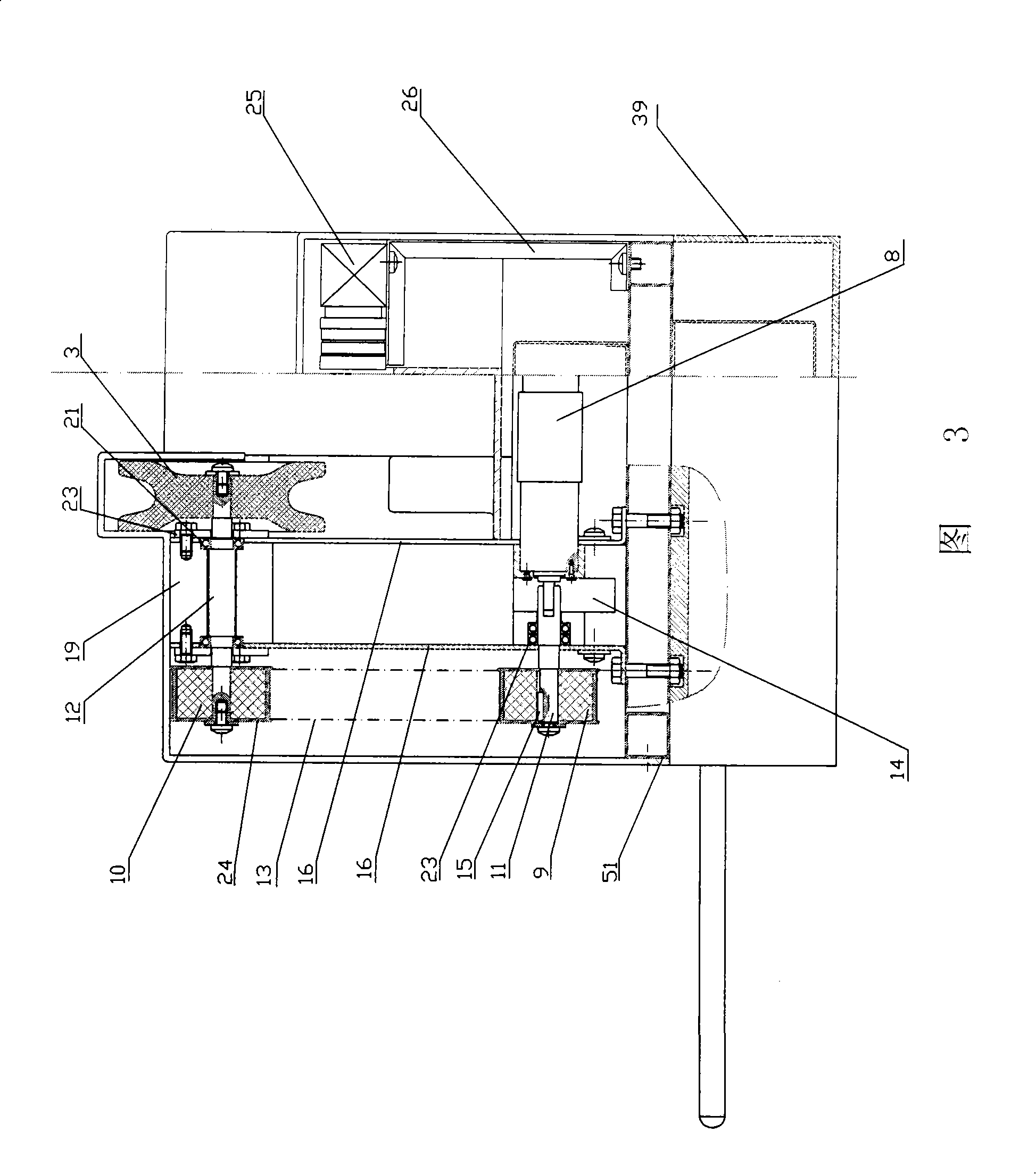
[0043] Such as figure 1 As shown, the high-voltage transmission line ground line inspection robot proposed by the present invention is composed of an online climbing part 1 and an offline image receiving control part 2 . The online climbing car part 1 is suspended on the ground wire of the high-voltage transmission line, and a camera is installed on it, which is mainly used to realize the online walking of the robot, and to take real-time pictures of the surface of the ground wire cable through the dual-way camera (the purpose is to detect whether there is damage and Broken stock, etc.), the captured image is transmitted to the offline image receiving control part 2 through the wireless image transmitter.
[0044] The offline image receiving control part 2 is mainly used to receive the image signal transmitted by the online climbing part, and send the signal to the computer for image display and processing. The operation of online climbing part 1, such as forward, backward, p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com