

Numerical control welding method, numerical control welding device and numerical control welding system
A welding method and welding device technology, applied in auxiliary devices, welding equipment, auxiliary welding equipment, etc., can solve the problems of low welding efficiency, irregular tooling, labor intensity of workers, etc., and achieve accurate positioning of welding points and welding tracking. The effect of accurate and high-efficiency automatic welding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below through specific implementation examples and in conjunction with the accompanying drawings.
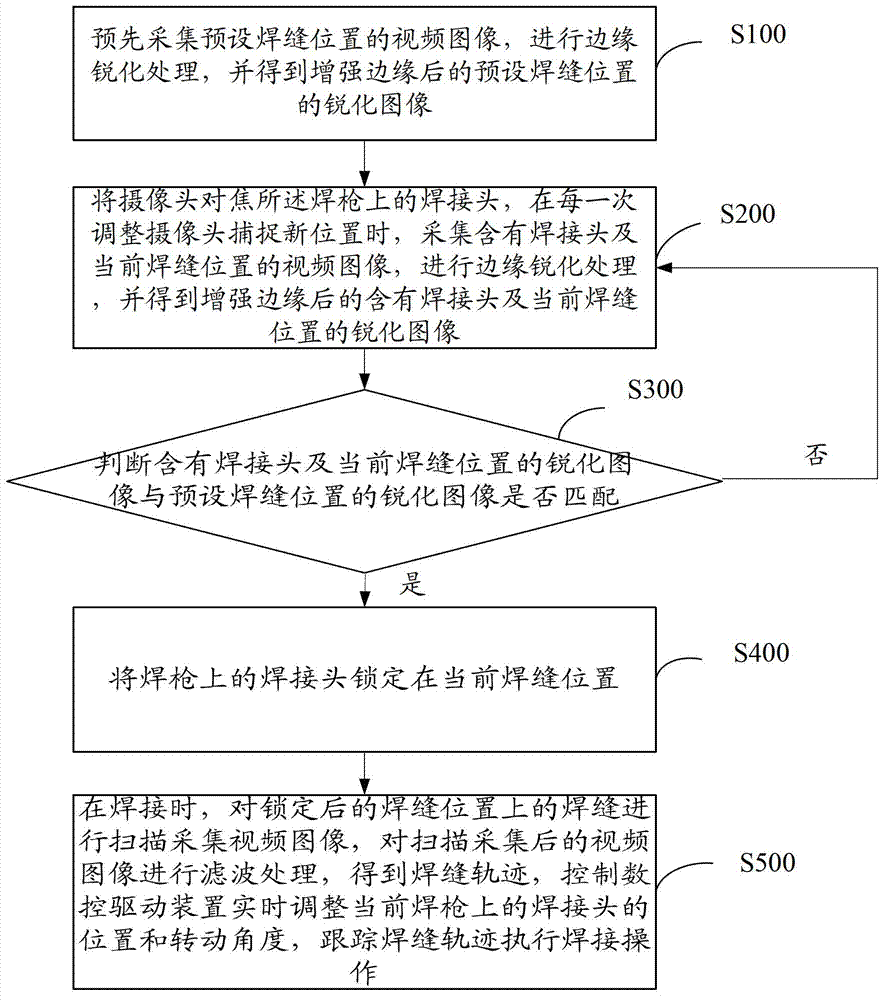
[0028] see figure 1 , the embodiment of the present invention provides a kind of numerical control welding method, comprises the following steps:
[0029] Step S100, pre-collecting the video image of the preset weld position, performing edge sharpening processing, and obtaining the sharpened image of the preset weld position after the edge is enhanced;
[0030] Step S200, focus the camera on the welding head on the welding torch, and collect a video image containing the welding head and the current welding seam position each time the camera is adjusted to capture a new position, perform edge sharpening processing, and obtain the enhanced edge containing A sharpened image of the weld head and the current weld position;
[0031] Step S300, judging whether the sharpened image containing the welding head and the curr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More