

Planning method for simulated path of robot under complex dynamic scene and simulation platform
A dynamic scene, robot technology, applied in the direction of instruments, simulators, navigation calculation tools, etc., can solve the problems of path segments being occupied by obstacles, failure, collision, and no consideration of environmental impact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below through specific embodiments and accompanying drawings.
[0022] Technical scheme of the present invention has included the content of four parts:
[0023] 1. Propose the measurement criteria for path security
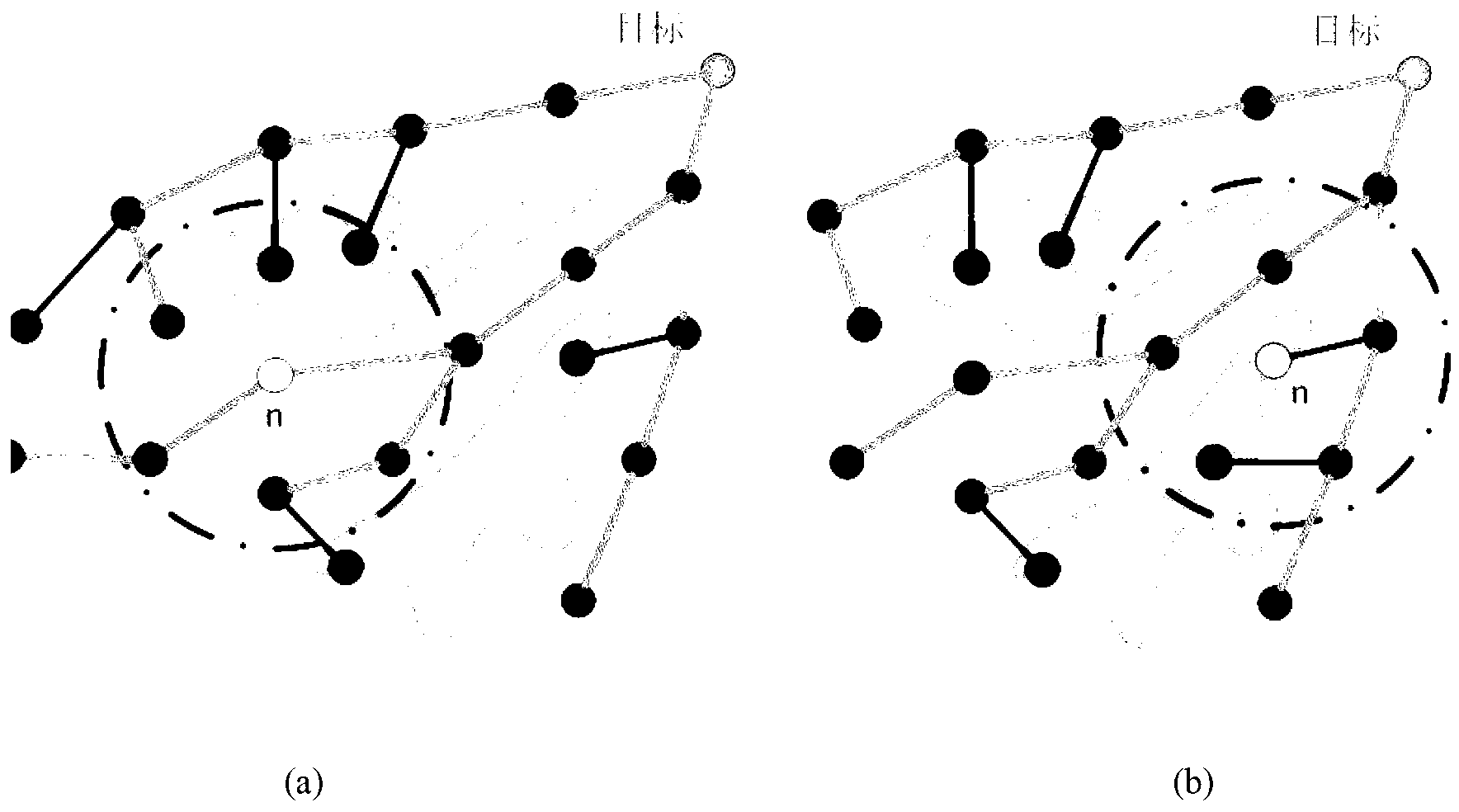
[0024] Because the probability-based planning algorithms proposed for dynamic environments in the past only take feasibility as the standard, there is a problem of path failure. In view of this, the present invention first introduces the local spatial environment information of each sampling point into the planning process, and proposes a criterion for identifying whether the path is safe by using the collision probability (Collision Probability, CP), which describes each local environment degree of obstacle congestion. At the same time, using the observation strategy of probability sampling, a method is designed to evaluate the possibility of collision, which improves its calculation efficiency. A node ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More