

A deformable soft robot
A robot and software technology, applied in the field of robotics, can solve problems such as inability to reach the work site, difficulty in realizing autonomous movement and obstacle surmounting of the robot, narrow working environment, etc., and achieve high efficiency of action execution, reduced design size, and high motion accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
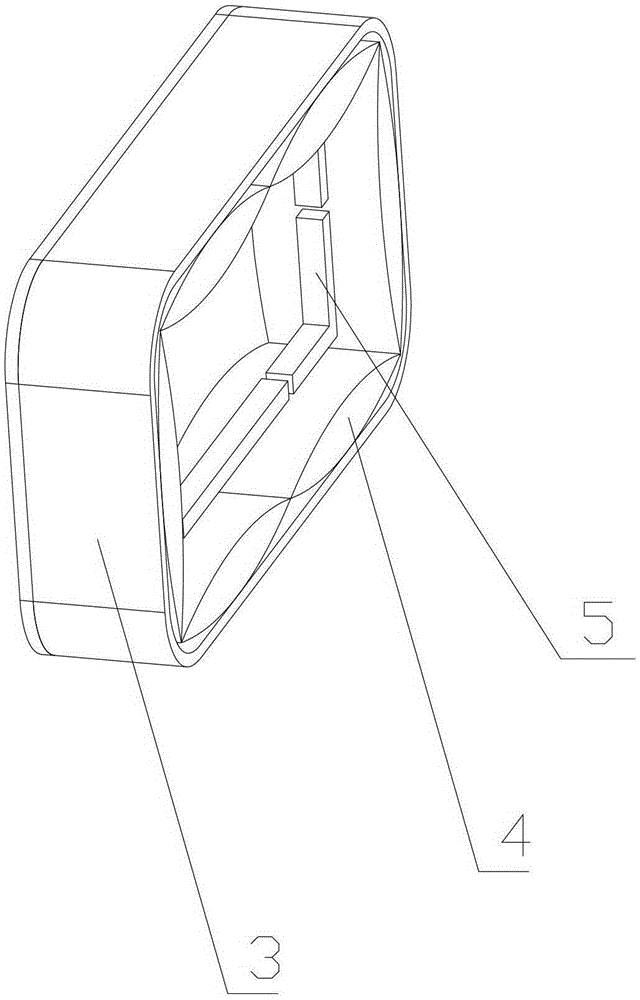
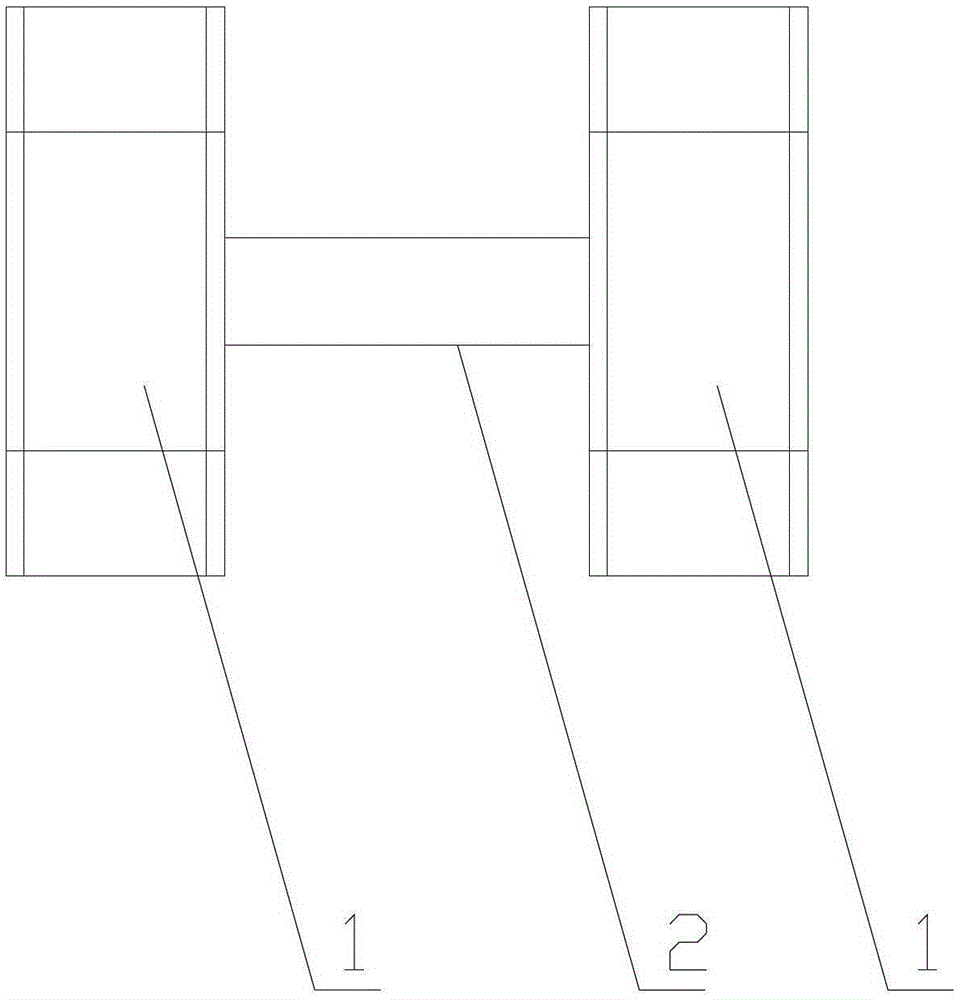
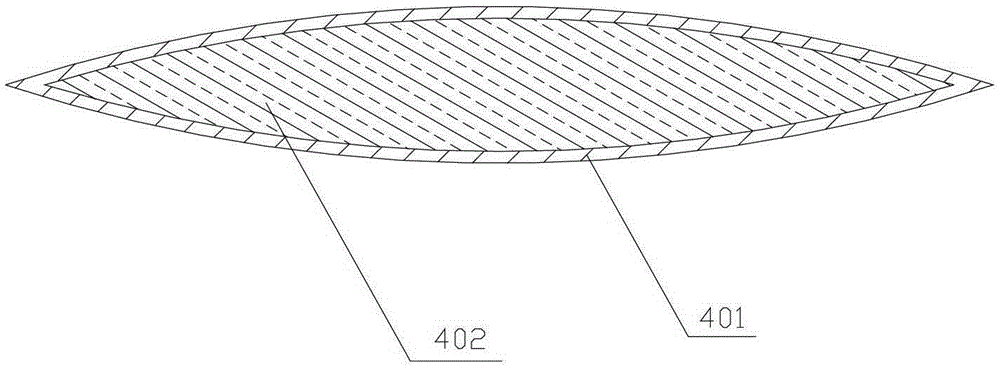
[0022] Such as Figure 1 to Figure 7 As shown, a deformable soft robot includes two driving units 1 and a rotating shaft 2 connecting the two driving units 1. The driving unit 1 includes an elastic shell 3 and a skeleton arranged in the elastic shell 3, so The skeleton includes a number of fluid cells 4 and an equal number of driving tubes 5. The fluid cells 4 are connected head to tail to form a circle. The fluid cells 4 include a cell wall 401 and an incompressible fluid 402 arranged in the cell wall 401. The drive tube 5 is arranged inside the fluid cell 4, and the drive tube 5 is connected to two adjacent fluid cells 4. The drive tube 5 is provided with a magneto-rheolog...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More