Method for controlling excavator in flat ground mode
A control method and excavator technology, applied in the field of control, can solve the problems of not being able to complete the leveling work well, troublesome excavator operators, etc., and achieve the effect of improving work quality and reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below according to the drawings and embodiments.
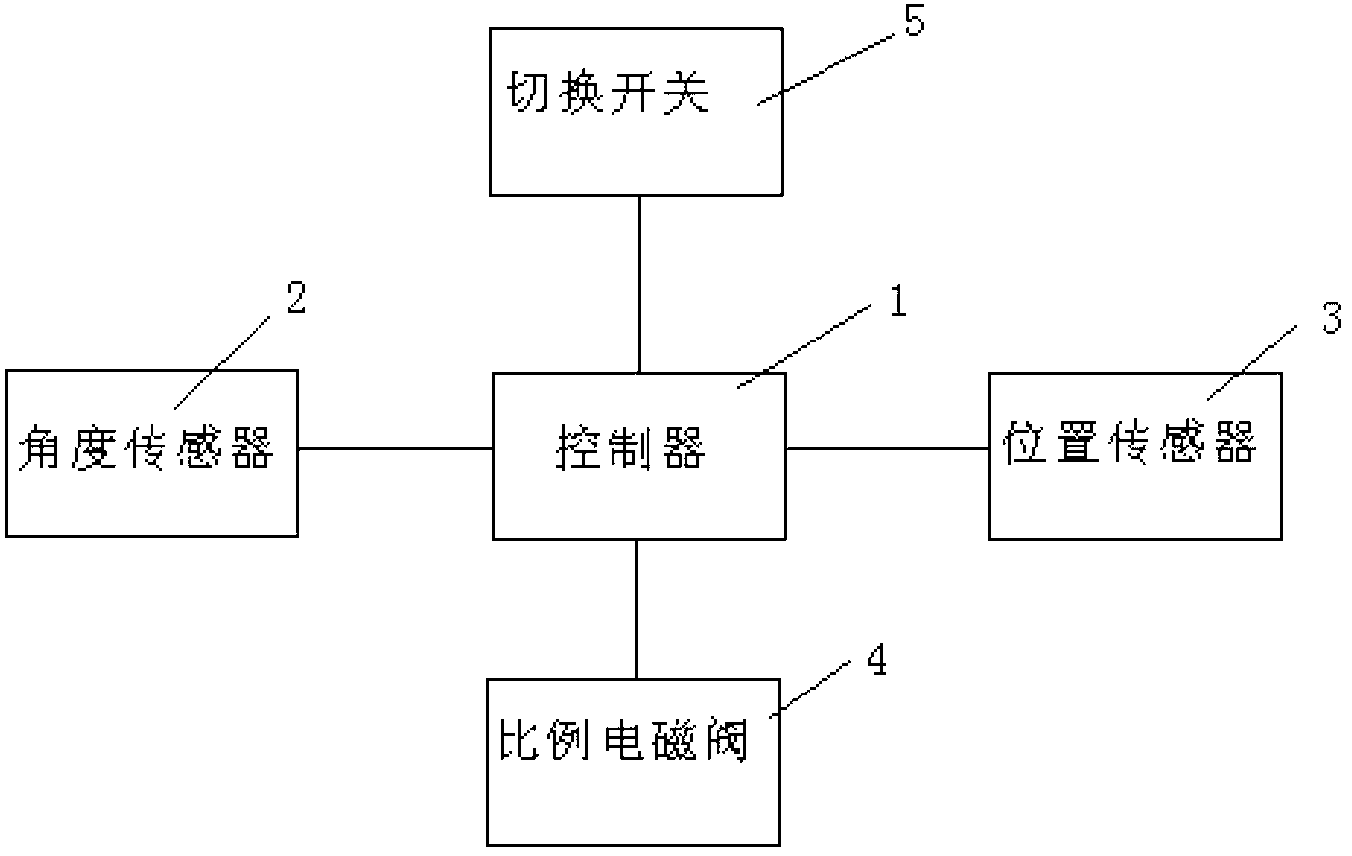
[0025] A control method for an excavator leveling mode, comprising the steps of:
[0026] Detect the current angle of the boom and stick of the excavator relative to the horizontal direction;
[0027] Detect the current position of the bucket of the excavator;
[0028] Adjust the stick to run to the preset position;
[0029] Adjust the bucket cylinder to run to the preset position.
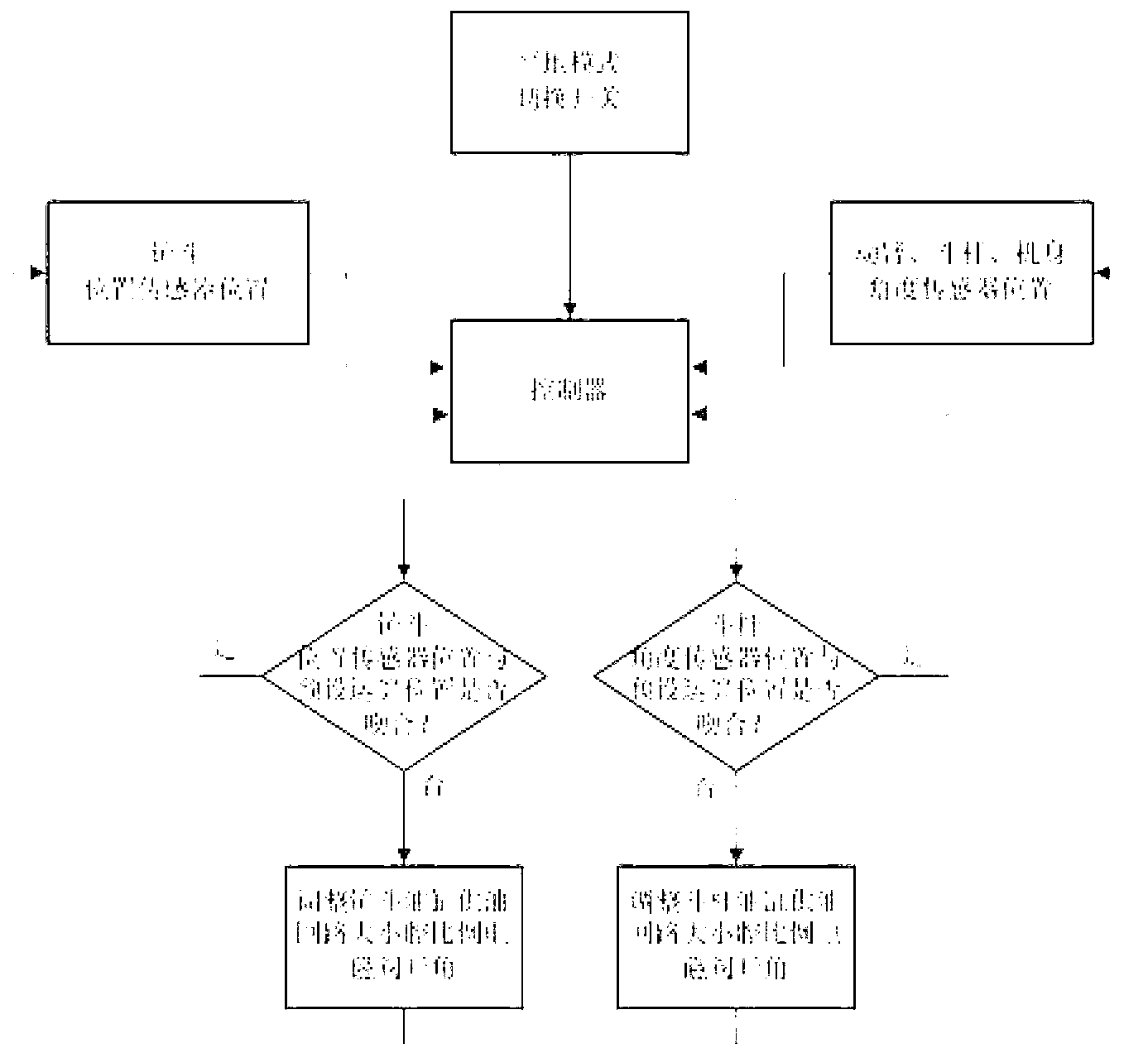
[0030] Further, the operation of the adjustment arm is based on the current angle of the boom.
[0031] Further, when detecting the current angle of the boom relative to the horizontal direction, it is judged whether the stick is in the preset position corresponding to the current angle of the boom, if yes, then keep the current position of the stick, if not, adjust the bucket The lever travels to the above preset position.
[0032] Further, the adjustment of the operation of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com