

Intelligent magic cube solving robot capable of autonomously grabbing magic cube, as well as magic cube solving method of intelligent magic cube solving robot
A technology of robots and robot bodies, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low safety protection performance, slow speed of solving Rubik's cube, no interaction, etc., achieve good application prospects, simple and reliable structure, good interactive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
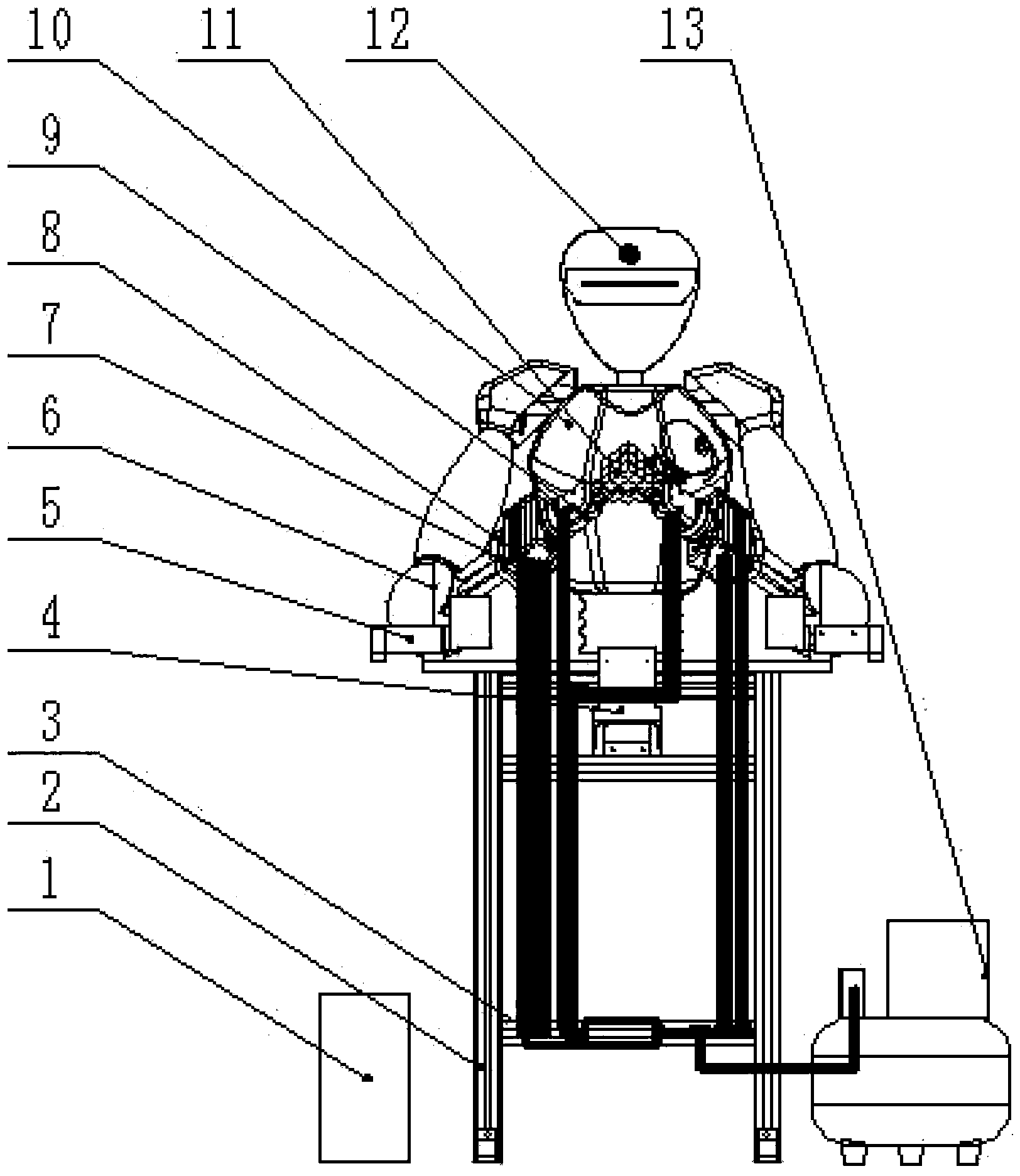
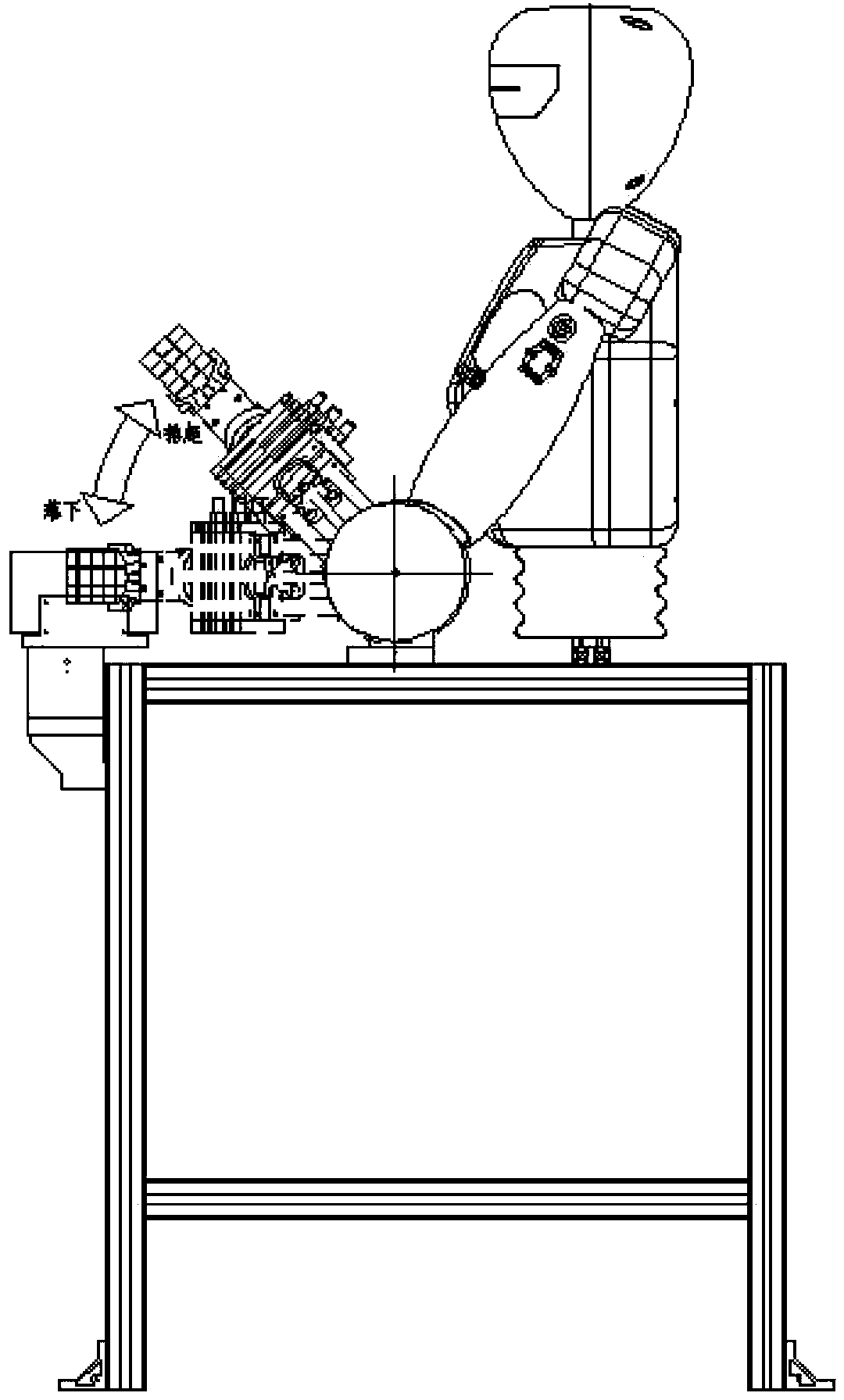
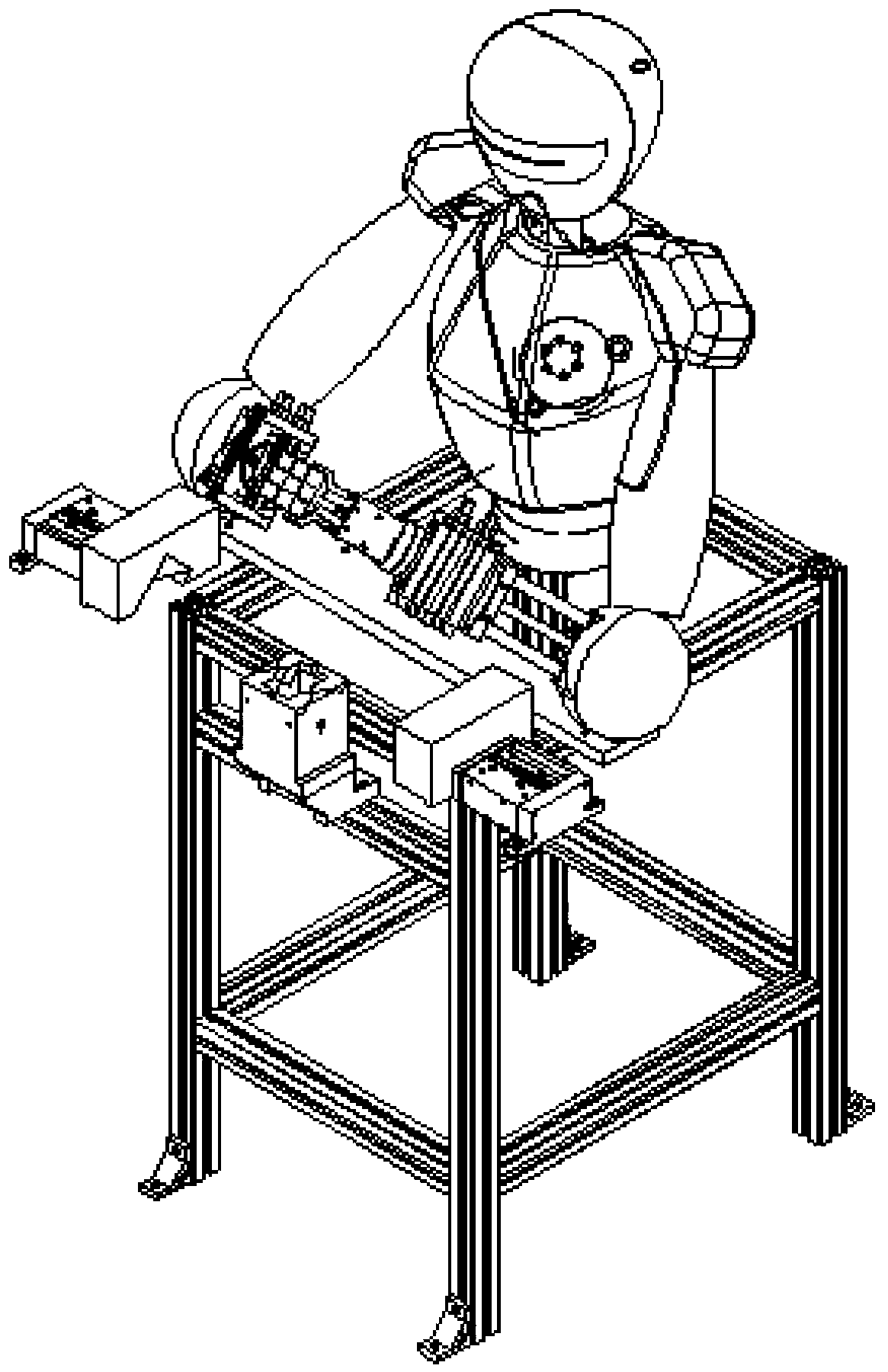
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
[0019] Such as Figure 1-3 As shown, an intelligent Rubik's Cube solving robot that can autonomously grasp the Rubik's Cube includes a control host 1, a truss 2, a pneumatic valve 3, a Rubik's Cube bin 4, a shaping bin 5, an arm swing structure 6, a platform 1 7, and a platform 2 8 , air claw 9, robot model 10, Rubik's cube 11, camera 12, air pump 13, described truss 2 adopts aluminum alloy material to make, is provided with Rubik's cube warehouse 4 on truss 2, is used to place Rubik's cube, is also set on truss 2 There is a shaping bin 5, and the shaping bin 5 merges before solving the Rubik's Cube and ensures that the Rubik's Cube is regular. A robot body 10 is arranged on the truss 2, and an arm swing structure 6 is fixed on the robot body 10. A swing table is connected to the arm swing structure 6. 7 and platform two 8, air claw 9 is connected on the platform two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More