

Wheel-legged robot and intelligent wheel-legged switching method
A wheel-legged robot and robot technology, applied in the field of robotics, can solve the problem that the robot cannot reach the set goal, and achieve the effect of improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
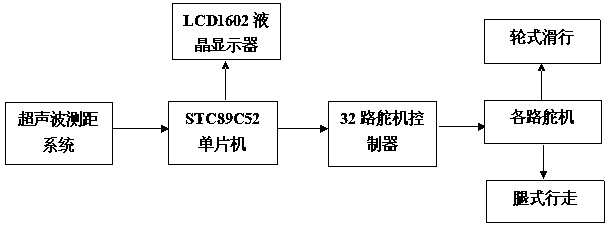
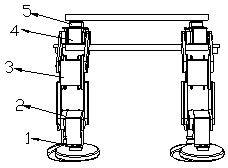
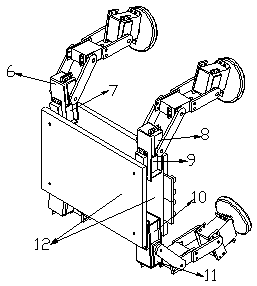
[0023] Such as figure 1 As shown in the wheel-legged robot, the base plate of the wheel-legged robot is divided into an upper base plate and a lower base plate, and the two base plates are fixedly connected. Multiple steering gears are controlled to realize the switching of the wheel legs. The wheel-legged robot is equipped with a STC89C52 single-chip microcomputer, an LCD1602 display connected by the output of the single-chip microcomputer, and a 32-way steering gear controller. Steering gear, the wheel-legged robot is equipped with an ultrasonic ranging system, which is used to detect the distance from the ground in the front, rear, left and right directions of the robot base. The ultrasonic generator and the third and fourth ultrasonic generators arranged at the rear of the robot base plate, and the first and third ultrasonic generators are arranged in a corresponding manner, and the second and fourth ultrasonic generators are arranged in a corresponding manner. The so-call...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More