

6R-type industrial robot load identification method
An industrial robot, load recognition technology, applied in the field of robots, can solve the problems of recognition error, increase the weight of the robot, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The utility model will be described in further detail below in conjunction with accompanying drawing.
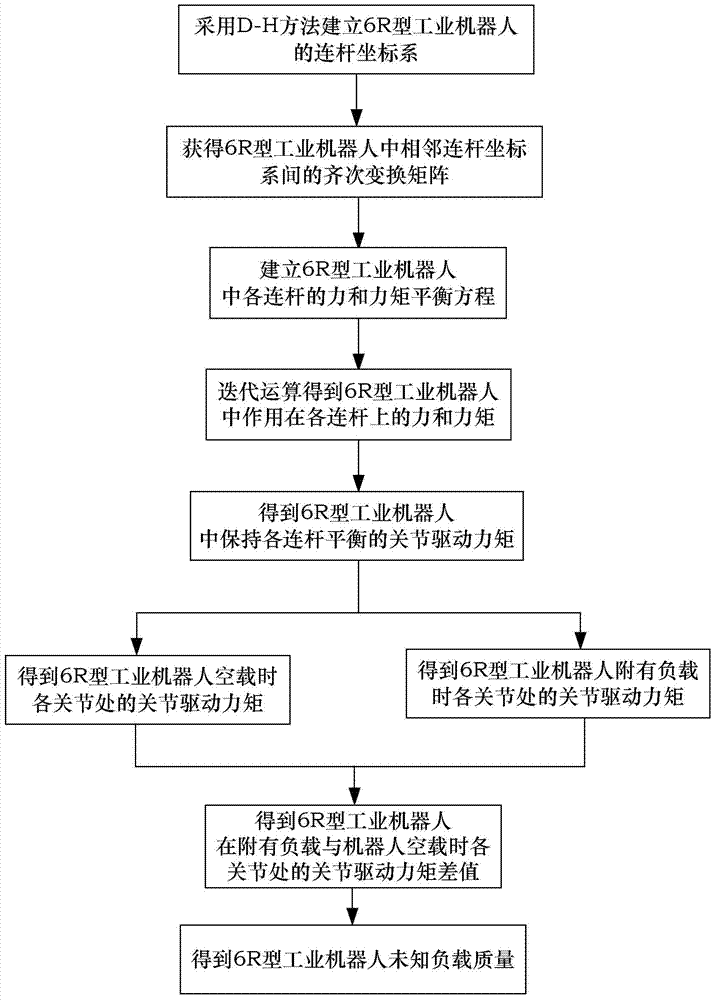
[0067] A kind of 6R type industrial robot load recognition method of the present invention, such as figure 1 As shown, it is realized through the following steps:
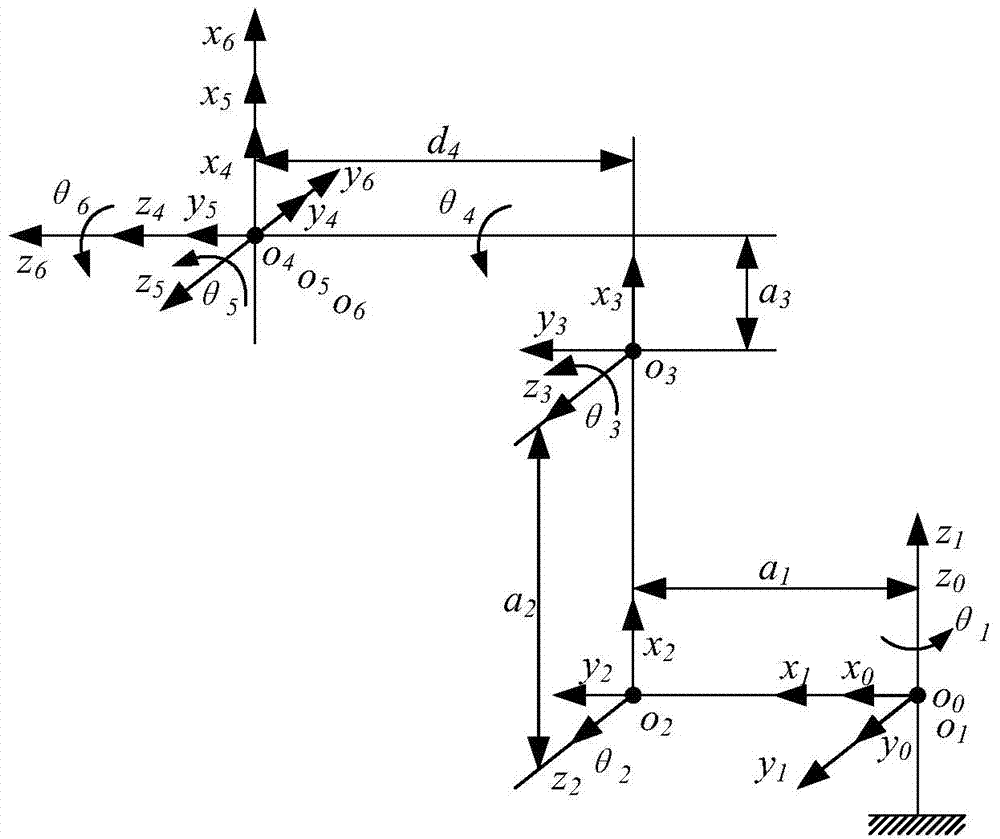
[0068] Step 1: According to the D-H method, establish the linkage coordinate system of the 6R industrial robot;
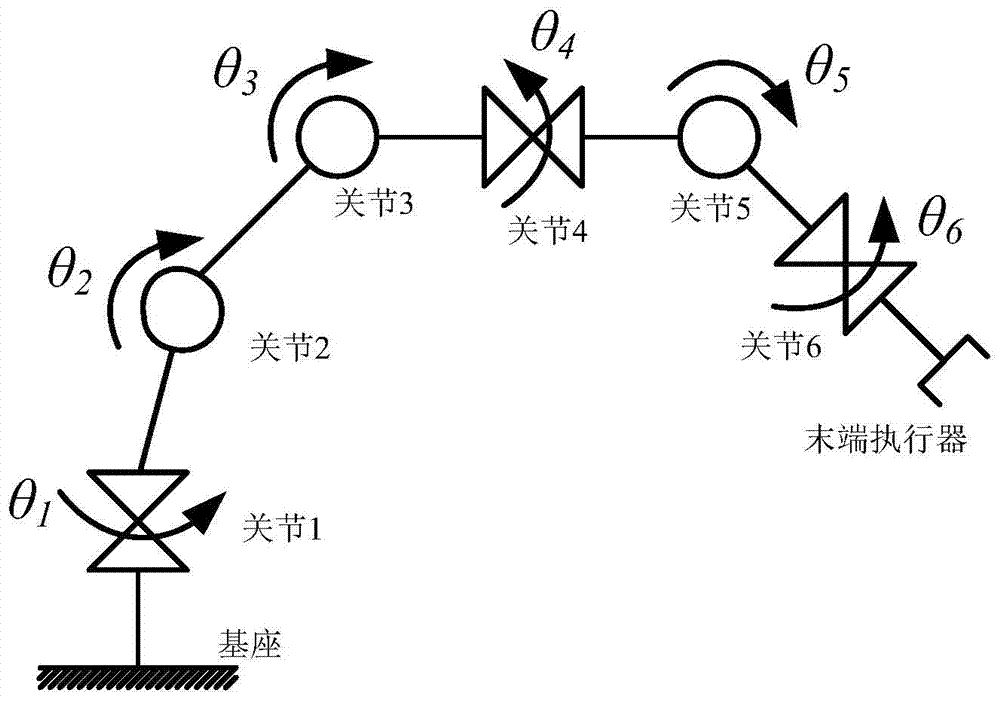
[0069] Such as figure 2 As shown, the 6R industrial robot refers to a 6-degree-of-freedom industrial robot whose joints are rotary joints; the 6R industrial robot can be regarded as composed of connecting rods and joints. In the connecting rod of the 6R industrial robot, set the fixed base as connecting rod 0, and then each movable connecting rod from the base side to the end effector side according to 1, 2, 3, 4, 5, 6 Each joint is numbered in the order of 1, 2, 3, 4, 5, 6 from the side of the base to the side of the end effector. In order to describe the relative positional relationship ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More