

Workpiece auto-carry device
An automatic and carrying technology, applied in the field of manipulators, can solve the problems of low processing efficiency, offset of connecting parts, complex structure, etc., and achieve the effect of less floor space, stable and accurate force transmission process, and large working range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in conjunction with the accompanying drawings and embodiments.
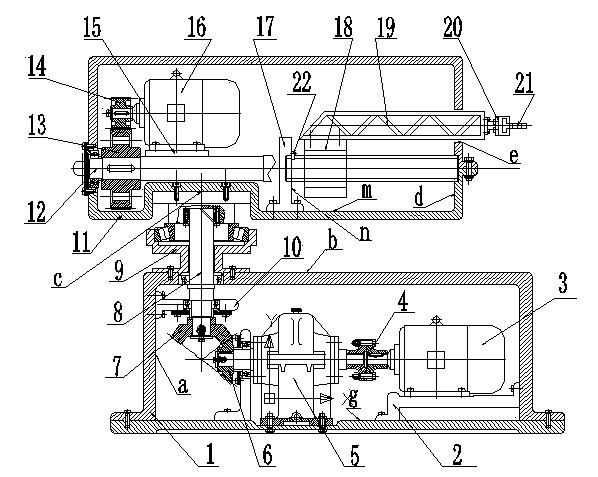
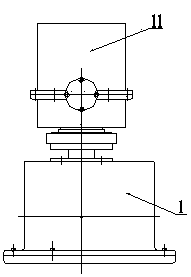
[0018] Such as Figure 1-2 As shown, the device can achieve a maximum grasping weight of 150kg, a maximum moving speed of 2m / s, an arm telescopic stroke of 200mm, a maximum working radius of 800mm, and an arm swing angle of 90°. The automatic workpiece loading device includes a box (1), one motor support plate (2), one three-phase asynchronous motor (3), flange coupling (4), reducer (5), small bevel gear (6), large bevel gear (7), Rotary shaft (8), support frame (9), support plate one (10), box body two (11), lead screw (12), large spur gear (13), small spur gear (14), motor support plate two (15), three-phase asynchronous motor two (16), support plate two (17), horizontal screw sleeve (18), truss (19), hand claw (21), cylinder (20), baffle plate (22), three The output shaft of phase asynchronous motor one (3) is connected with the input shaft of the reduce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More