

Five-joint frog-like jumping robot
A robot and five-joint technology, applied in the field of jumping robots, can solve problems such as poor buffering effect and affect take-off efficiency, and achieve the effects of improving flexibility, take-off and buffering effects, optimizing leg structure, and improving utilization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing, specific embodiment of the present invention is described in further detail:
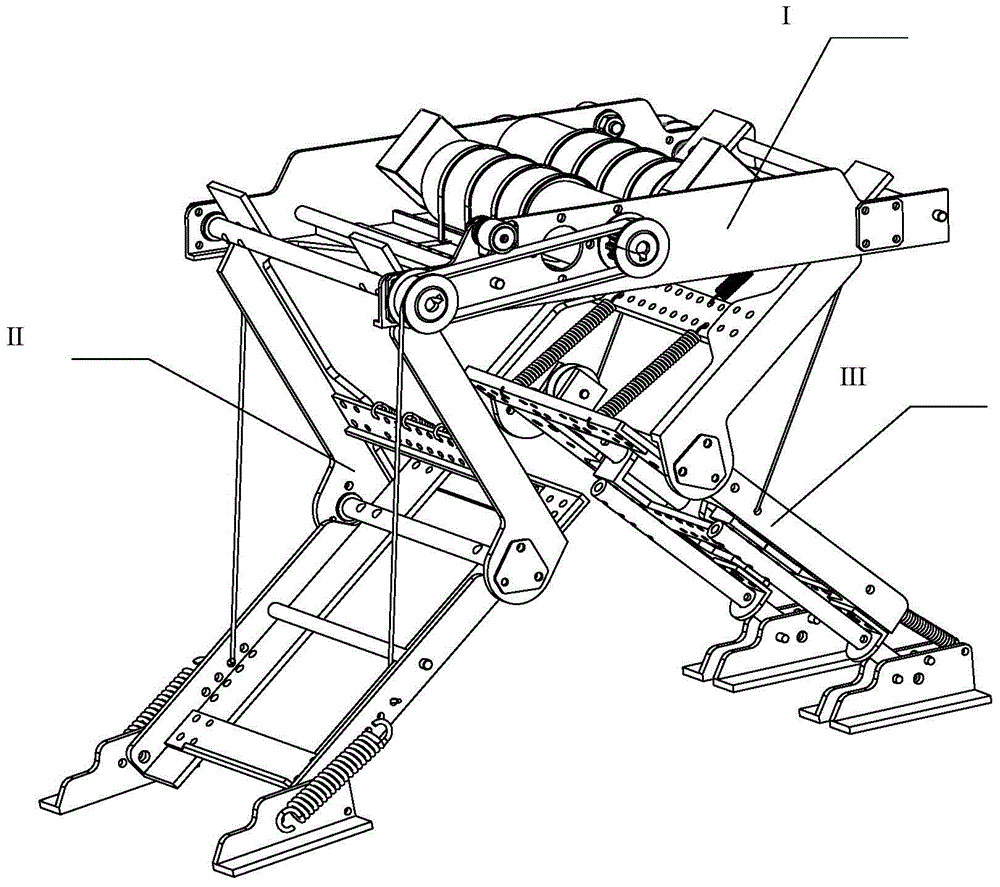
[0021] combine figure 1 , the robot is mainly composed of three parts: trunk mechanism Ⅰ, forelimb mechanism Ⅱ and hind limb mechanism Ⅲ. The jumping process of the robot is mainly realized by the coordinated movement of the front and rear limbs. The trunk mechanism is connected with the forelimb mechanism II and the hind limb mechanism III through the shoulder joint axis 9 and the ankle joint axis 1 respectively.
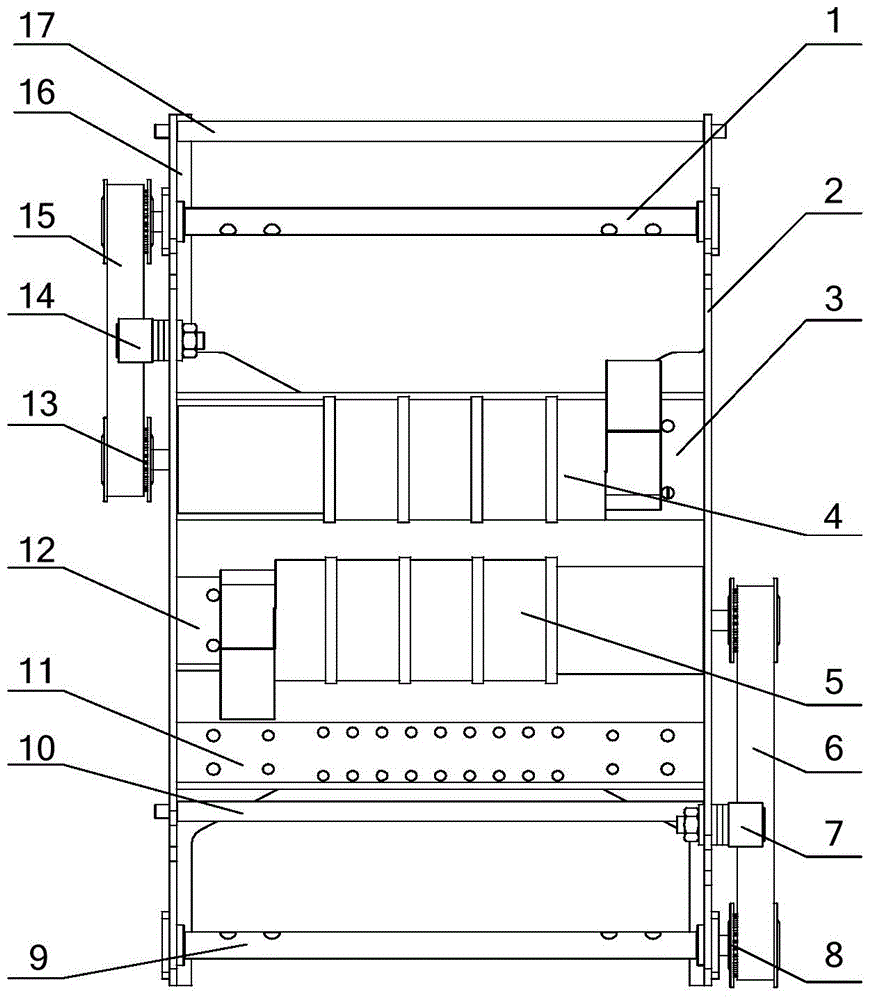
[0022] combine figure 2 , the torso mechanism mainly includes: two driving motors, left and right body side plates A16 and B2, a reinforced support shaft 10, a body rear limb hanging spring shaft 17, a motor protection plate 12, a body fixing plate A3 and a body fixing plate B11, two synchronous belt transmission mechanisms, the synchronous belt transmission mechanism is connected with the drive motor through a flat key, and ther...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More