

Soft fish robot driven by chemical energy release reaction
A technology of energy release reaction and robot, applied in propulsion engine, ship propulsion, ship parts, etc., can solve the problems of small driving force, small instantaneous driving force, high environmental temperature requirements, etc., and achieve high average speed and high degree of bionics , the effect of fast response time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with accompanying drawing.
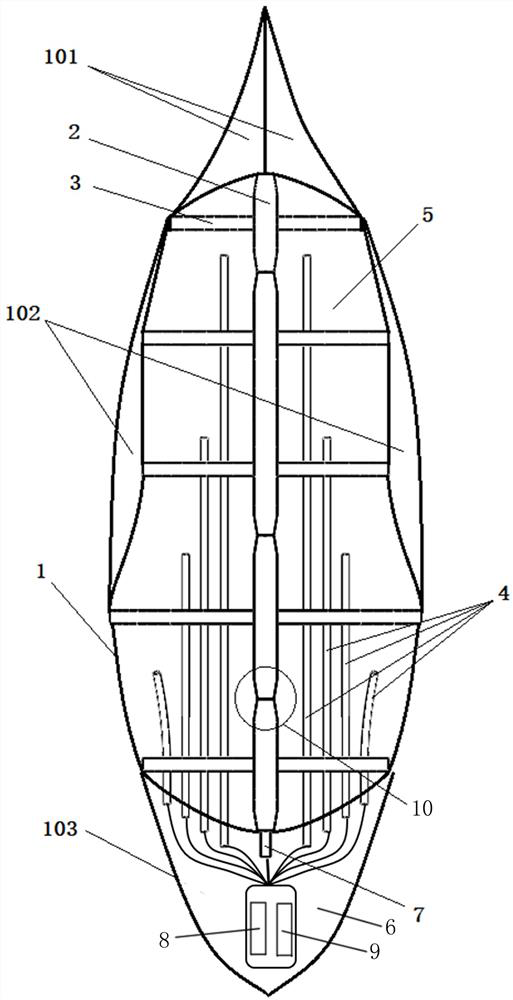
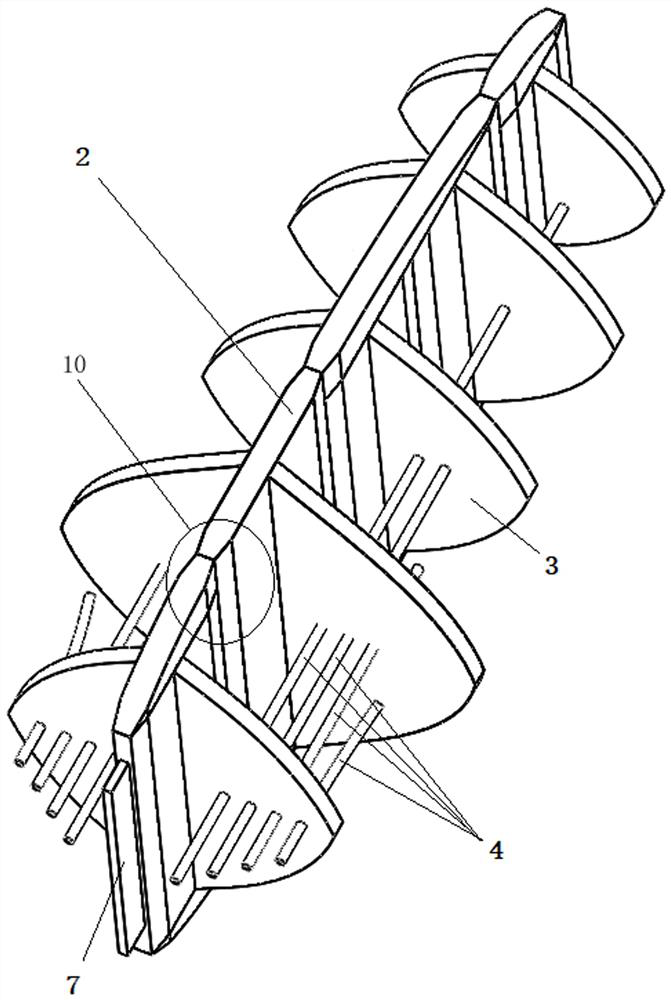
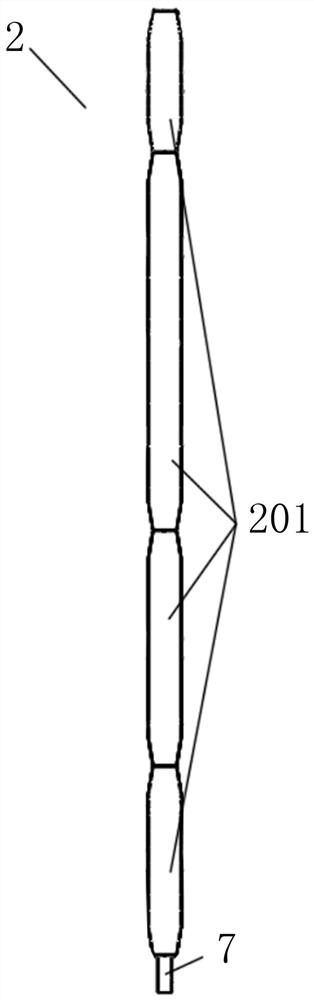
[0018] As shown in the figure, a mollusc fish robot driven by a chemical discharge energy reaction includes a flexible skeleton, a flexible fish skin 1 wrapped outside the flexible skeleton, and a chemical discharge energy reaction system. The flexible skeleton includes a flexible fish spine 2, several The flexible fish bones 3 arranged on both sides of the flexible fish spine 2 and arranged along the length direction of the flexible fish spine 2, the flexible fish skin 1 tightly covers the flexible skeleton, and the inner cavity of the mollusc fish robot is separated by the flexible skeleton into a Storage chamber 6 and some energy discharge reaction chambers 5, the storage chamber 6 corresponds to the fish head part of the mollusc fish robot, the energy discharge reaction chamber 5 corresponds to the fish body of the mollusc fish robot, and each energy discharge reaction c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More