

Amphibious miniature quadruped robot underwater motion control method
A quadruped robot and motion control technology, applied in the field of robotics, can solve problems such as reducing concealment, increasing noise, and poor concealment, and achieve the effects of reducing energy consumption, improving stability, and improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below in conjunction with the accompanying drawings.
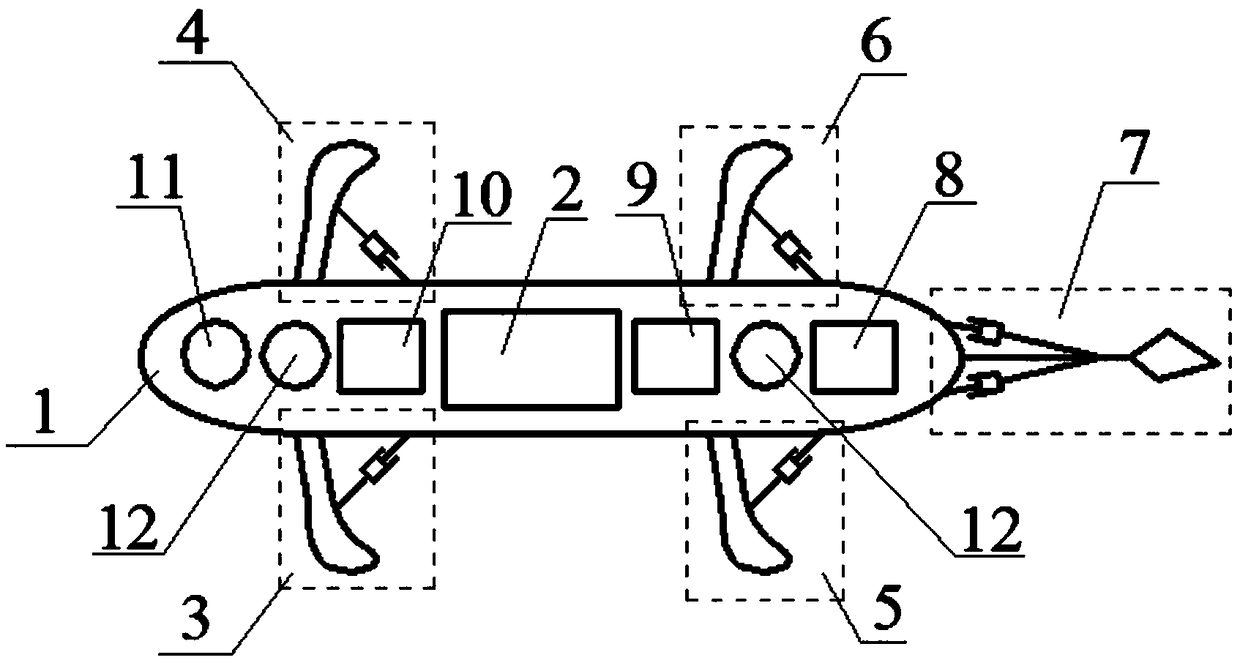
[0074] The invention discloses a water motion control method of an amphibious miniature quadruped robot, which relates to specific control modes of the robot in various motion modes in water, including a roaming mode, a floating-sink adjustment mode, a breaststroke-like mode, a two-legged wading mode and a four-legged wading mode.
[0075] The control process of the roaming mode is as follows:
[0076] (1) The communication sensing module 11 detects the surrounding environment information of the robot, and transmits the signal to the control center;
[0077] (2) The communication sensing module 11 receives the control signal from the control center, and inputs the control signal to the control module 10;
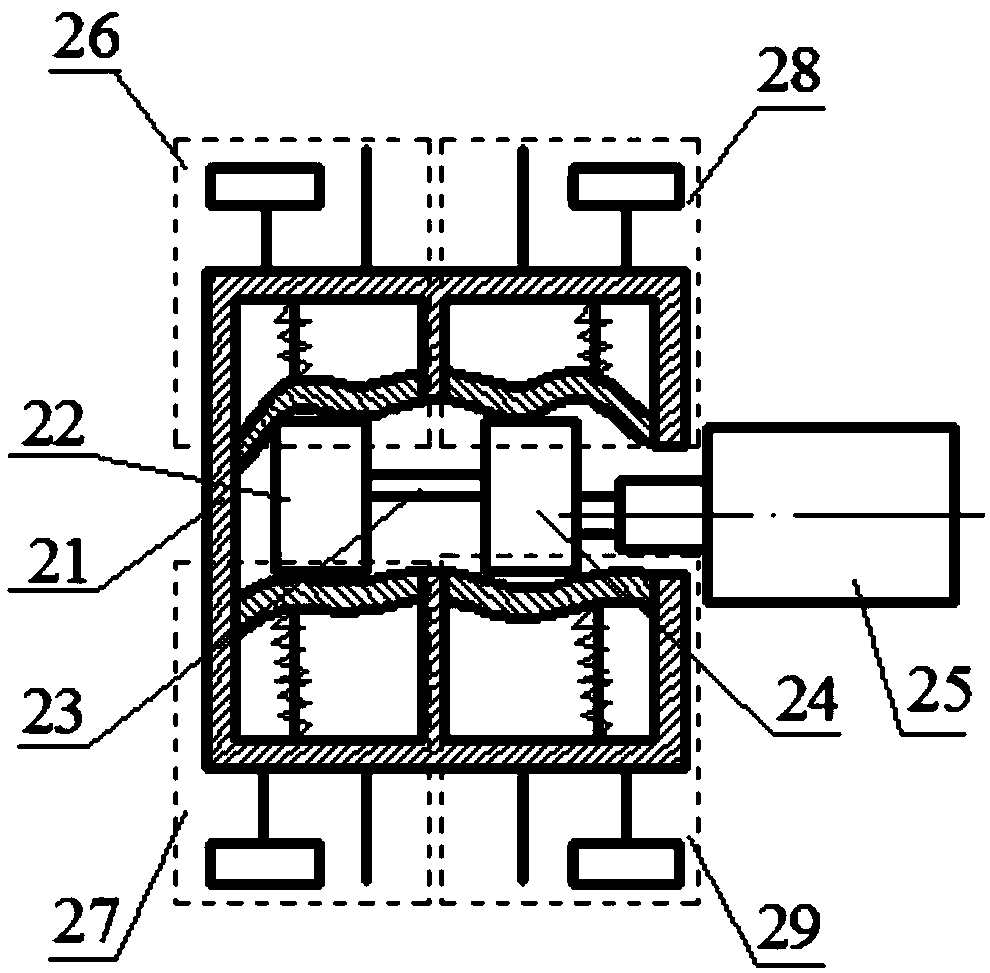
[0078] (3) The control module 10 starts to work, controls the motor 25 by the control signal, so that the motor 25 stops rotating;
[0079] (4) The control modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More