

A seabed ultrasonic drilling and sampling robot imitating jellyfish swimming
An ultrasonic wave and imitation jellyfish technology, applied in the direction of sampling devices, underwater operation equipment, non-rotating propulsion elements, etc., can solve the problems of poor ability to adapt to rock beds, poor diving stability, etc., and achieve the effect of simple structure and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further explained below in conjunction with the accompanying drawings.
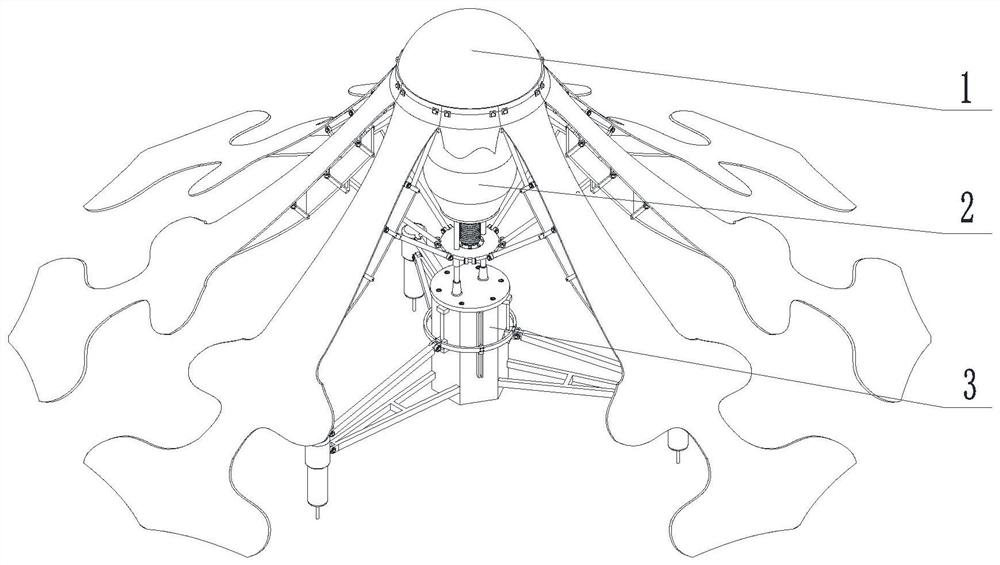
[0027] Such as figure 1 As shown, a jellyfish-like swimming-type submarine ultrasonic drilling and sampling robot includes a jellyfish-like swimming device 1 , a central power cabin 2 , and an anchor drilling device 3 .
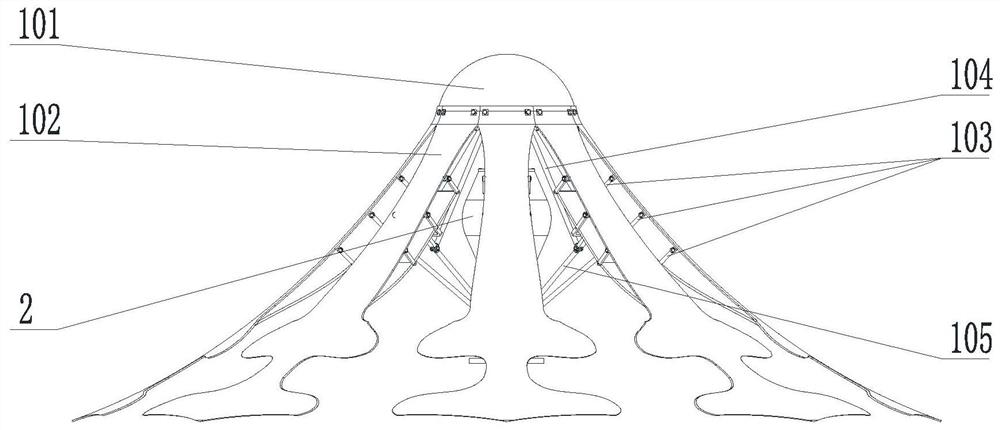
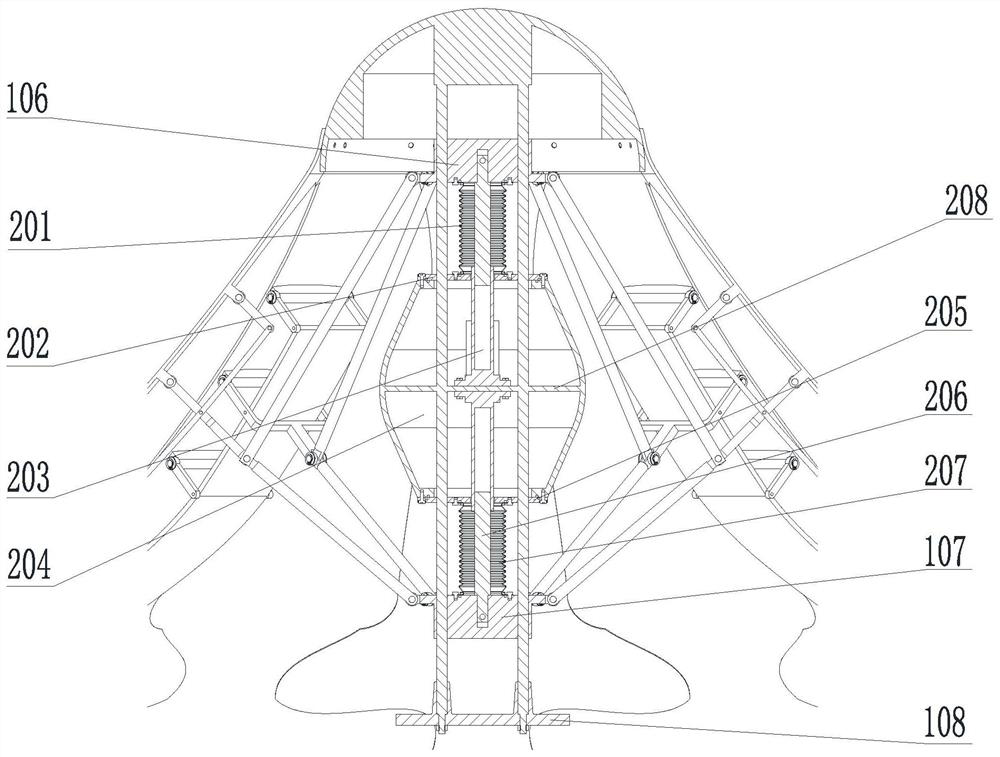
[0028] Such as Figure 1 to Figure 4 As shown, the jellyfish-like swimming device 1 includes a base 101 , eight groups of tentacles evenly distributed around the head of the base 101 , a first tentacle driving slider 106 , a second tentacle driving slider 107 , and a middle connection plate 108 . The tentacle mechanism includes a flexible tentacle 102 , a tentacle support 103 , a first tentacle drive link 104 , and a second tentacle drive link 105 . Wherein, the base 101 is composed of a hemispherical head and two uprights symmetrically fixed under the hemispherical head, and the middle connection plate 108 is fixed on the ends of the two uprights o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More