

Propelling structure based on miniature underwater detection robot
A robot and micro water technology, applied in the field of robots, can solve the problems of complex propulsion structure, achieve the effect of simple structure, realize swimming and lifting, and good flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
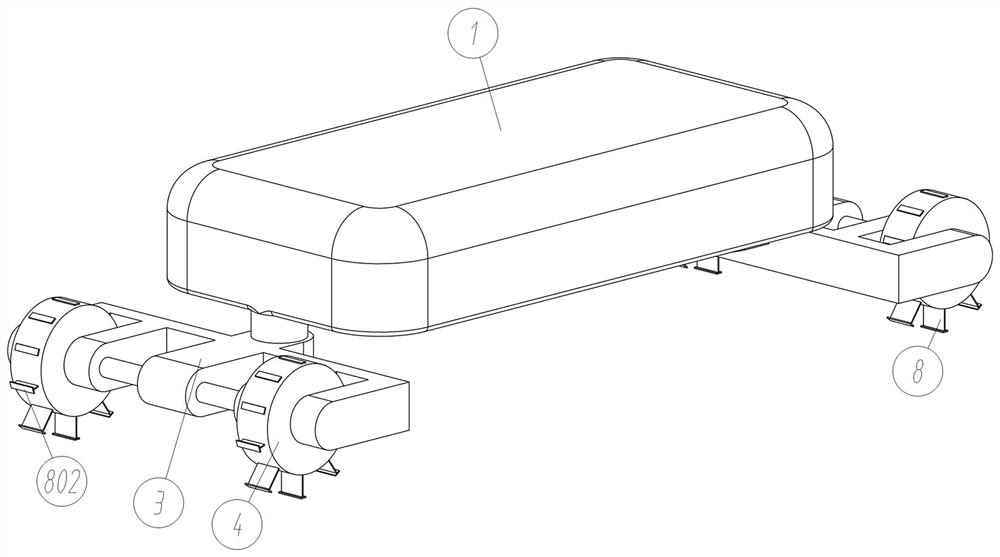
[0046] see Figure 1 to Figure 8 , an embodiment provided by the present invention: a propulsion structure based on a miniature underwater detection robot, including a robot main body 1;
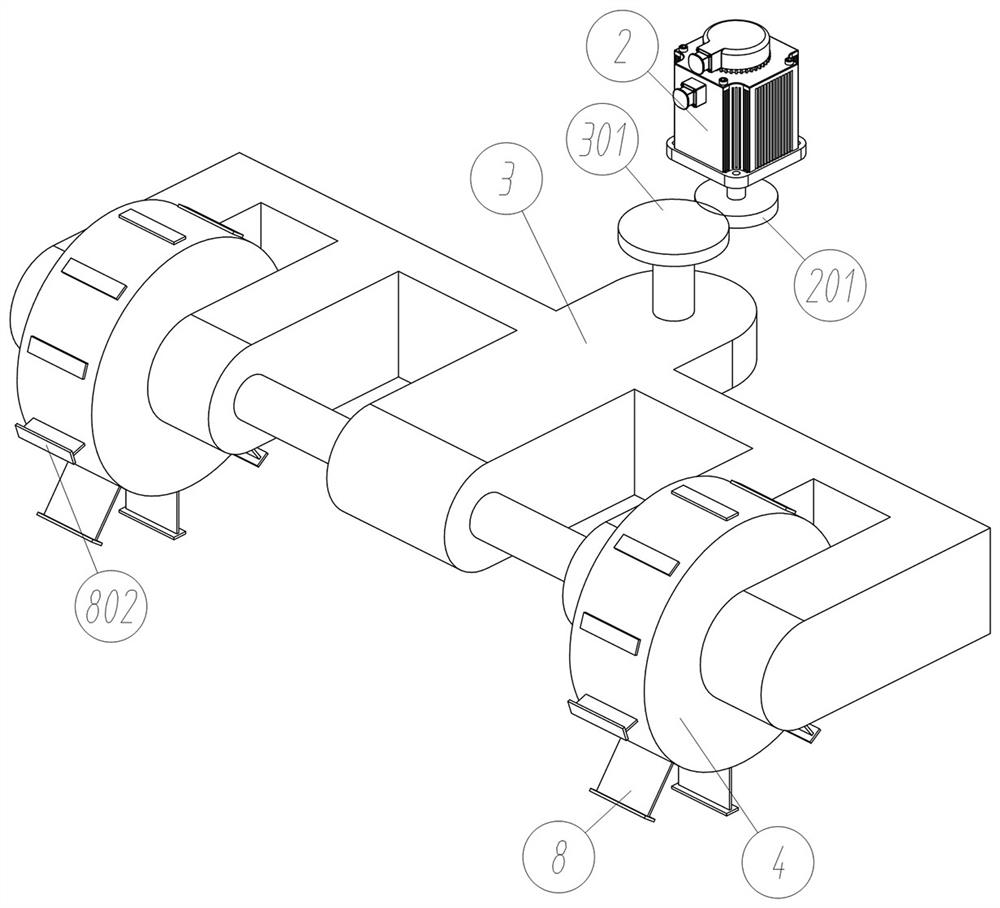
[0047] Swing seat 3, the swing seat 3 is connected to the bottom of the left and right sides of the robot main body 1 in rotation;
[0048] Steering drive 2, steering drive 2 is provided with two groups altogether, two groups of steering drive 2 are respectively fixedly connected in the inside of robot main body 1 left and right sides, and steering drive 2 drives swing seat 3 to rotate through steering drive mechanism; The driving mechanism also includes: a steering drive gear 201...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More