

Self-adaptive controller used for parallel robot
A technology of adaptive controllers and robots, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0012] The present invention will be described in further detail below in conjunction with the accompanying drawings.
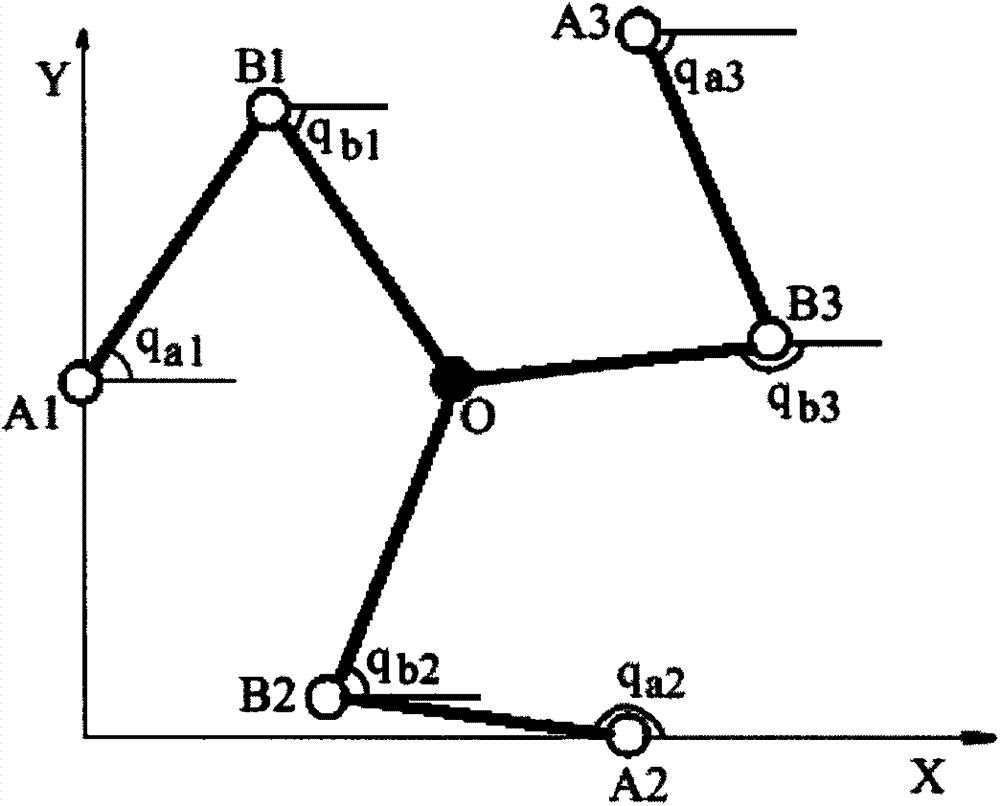
[0013] The present invention takes two-degree-of-freedom redundant drive parallel robot as research object (such as figure 1 shown).
[0014] (1) Model description.
[0015] The structure of the parallel robot with redundant drives in the task space is as follows: figure 1 As shown, the robot is driven by three servo motors located at A1, A2, A3, q a1 ,q a2 ,q a3 are the active angles of the three active joints, q b1 ,q b2 ,q b3 are the driven angles of the three driven joints, respectively. This device contains three independent two-degree-of-freedom devices, each device has the following dynamic equations:
[0016] M i q . . i + C i q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More