

Periodic adaptive learning control method of input saturation mechanical arm system
A technology of adaptive learning and control method, applied in the field of periodic adaptive learning control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
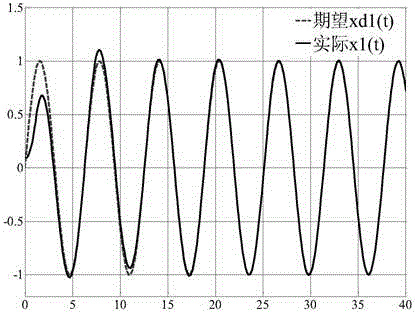
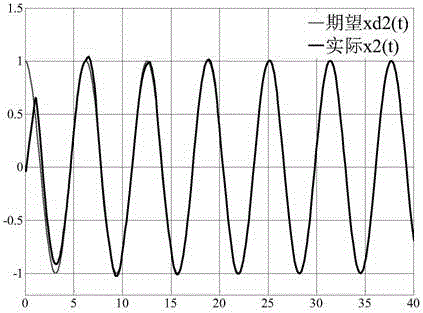
[0081] For the strongly coupled, nonlinear and time-delay manipulator periodic system with many uncertainties in the form of formula (1), x 1 (t) and x 2 (t) are the rotation angle and angular velocity of the mechanical arm respectively, the parameter mass of the mechanical arm is m=3kg, the length of the mechanical arm is l=1m, and the coefficient of inertia J m =ml 2 , gravitational acceleration g=10m / s 2 ,when When it is external disturbance, z(t)=|cos(2t)|, system period T=2π. Torque saturation input υ(t)=f(t), and the saturation boundary υ max =0.8, υ min =-0.8, at this time the manipulator system can be rewritten as formula (2) in the form:
[0082]
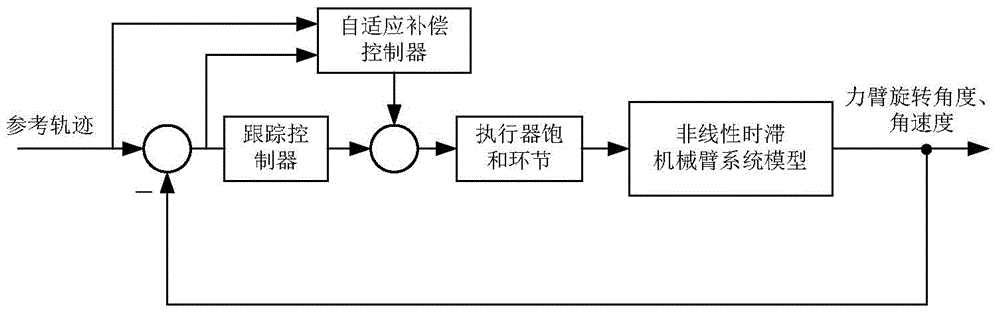
[0083] The structure diagram of the control system of the inventive method is as figure 1 shown. Design according to the tracking controller of formula (7) and (8) form according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More