

Inverted pendulum self-adaptive iterative learning inversion control method
A technology of adaptive iterative and inversion control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of estimating and compensating the unknown uncertainty of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0126] The present invention will be further described below in conjunction with the accompanying drawings.
[0127] refer to Figure 1-Figure 5 , an inverted pendulum adaptive iterative learning inversion control method, characterized in that: the control method includes the following steps:
[0128] Step 1, establish the dynamic model of the inverted pendulum, initialize the system state, sampling time and control parameters, the process is as follows:
[0129] 1.1 The expression form of the dynamic model of the inverted pendulum is:
[0130]
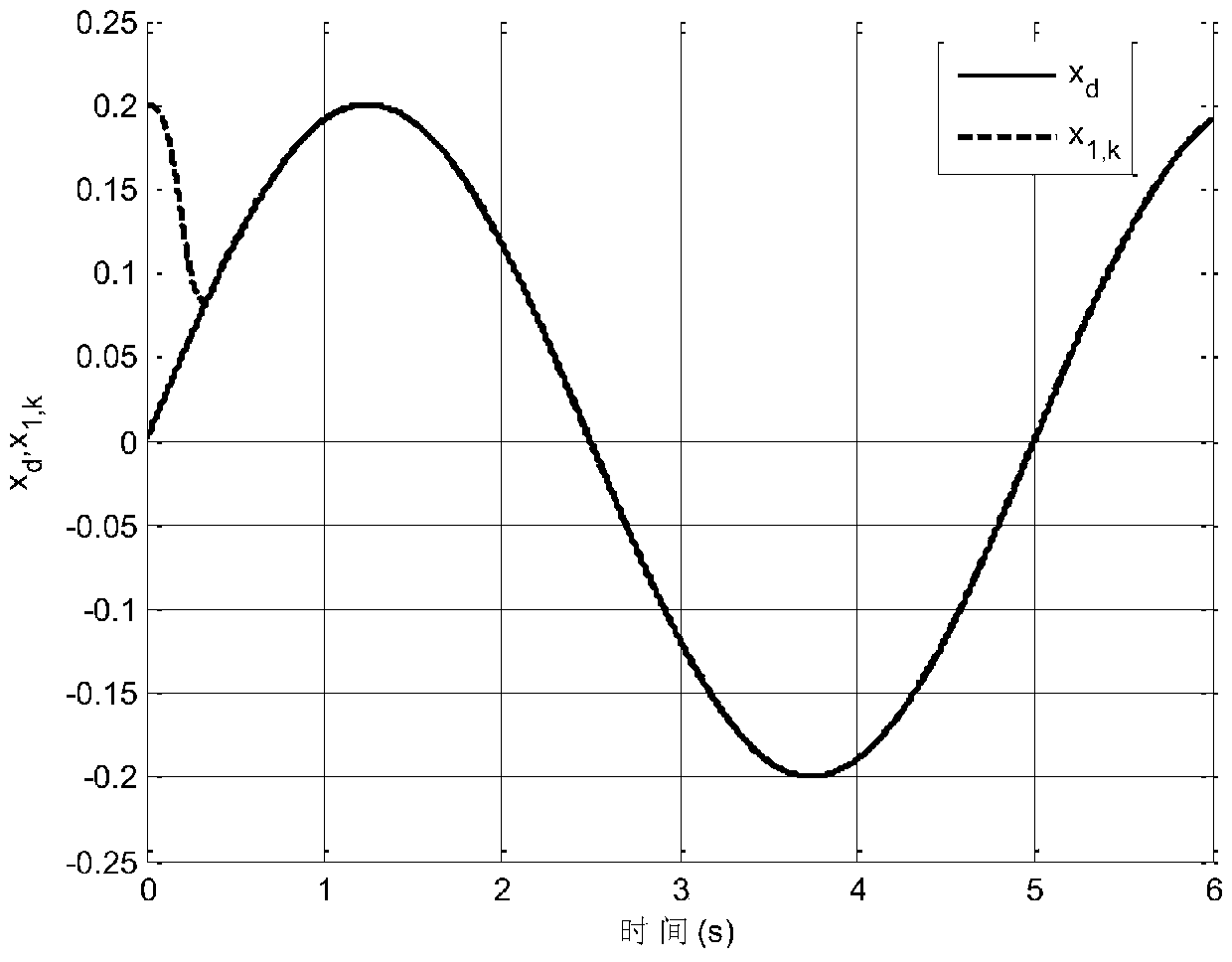
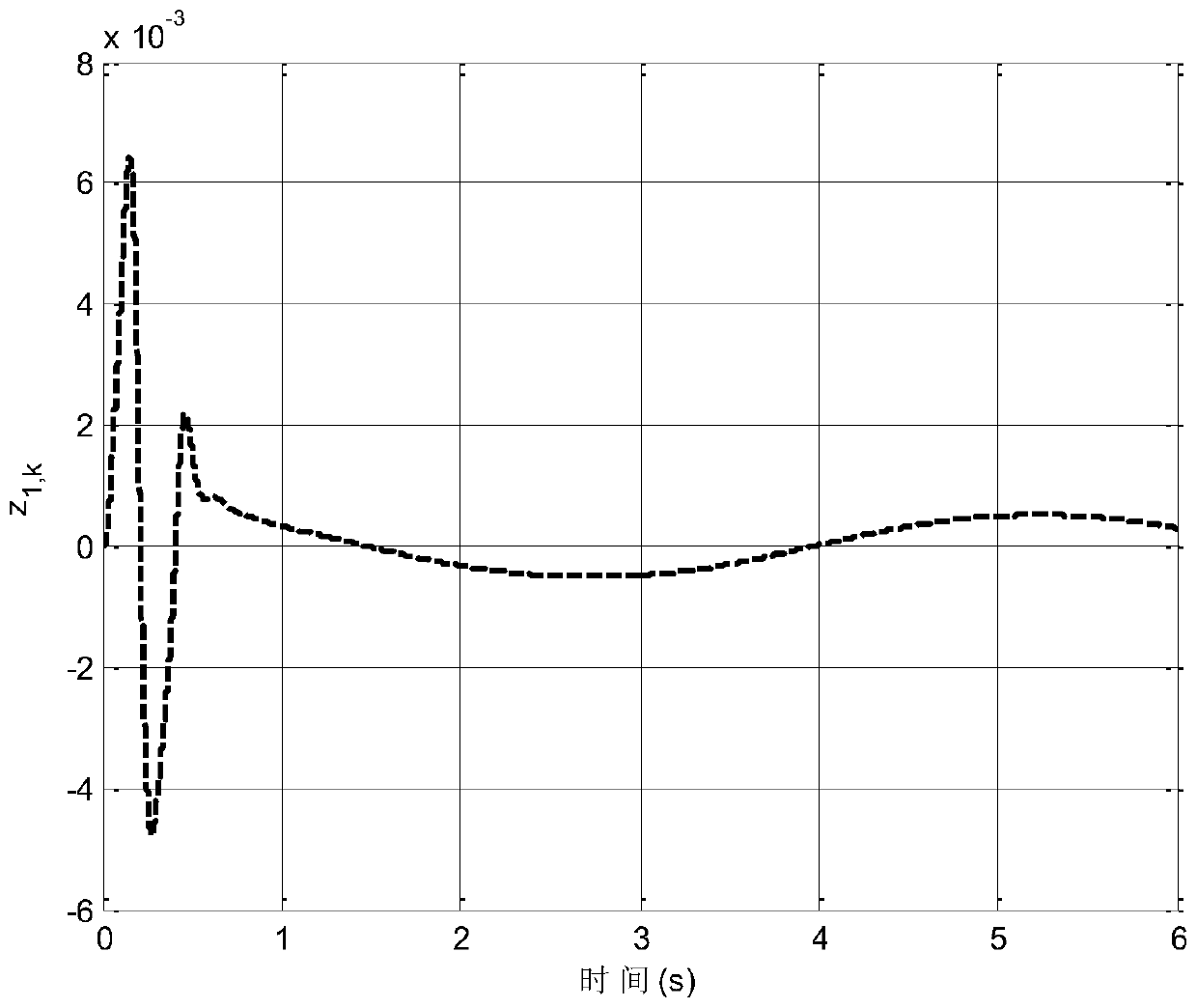
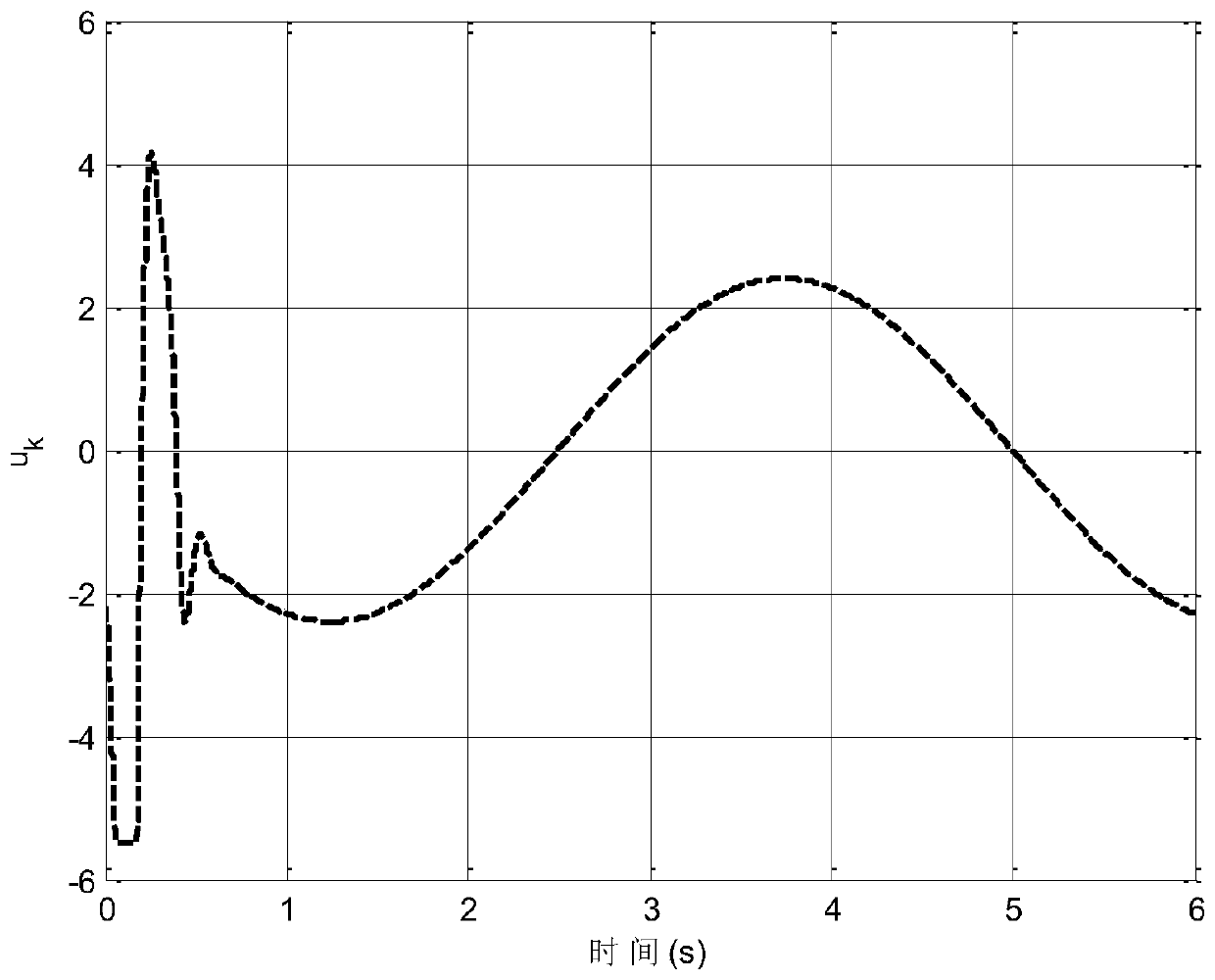
[0131] where x 1,k , x 2,k are the angular position and angular velocity, respectively, and k is the number of iterations; are the first derivatives of angular position and angular velocity, respectively; g is the acceleration of gravity; m c , m are the masses of the trolley and the inverted pendulum respectively; l is half the length of the inverted pendulum; u k Indicates the control input, sat(u k ) represents the contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More