Exoskeleton-type hand function rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the direction of passive exercise equipment, physical therapy, etc., can solve the problems of affecting the hand function of patients, the difficulty of hand rehabilitation, and the long rehabilitation period, so as to promote the recovery of hand function and rehabilitation. Effective effect of time shortening and recovery exercise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
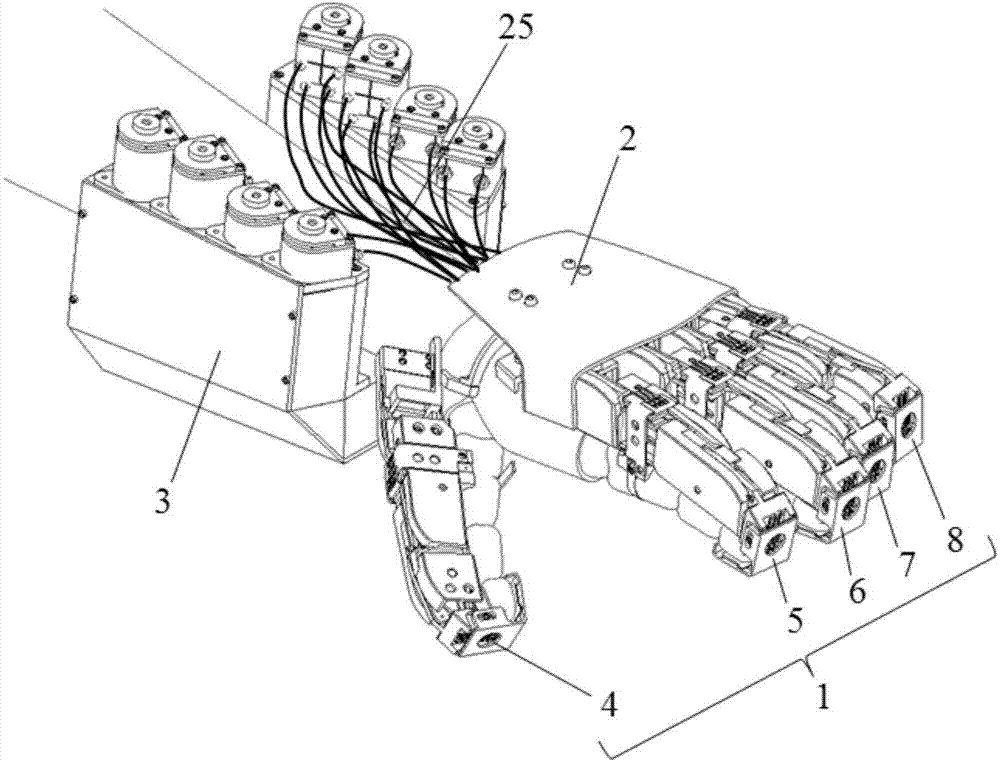
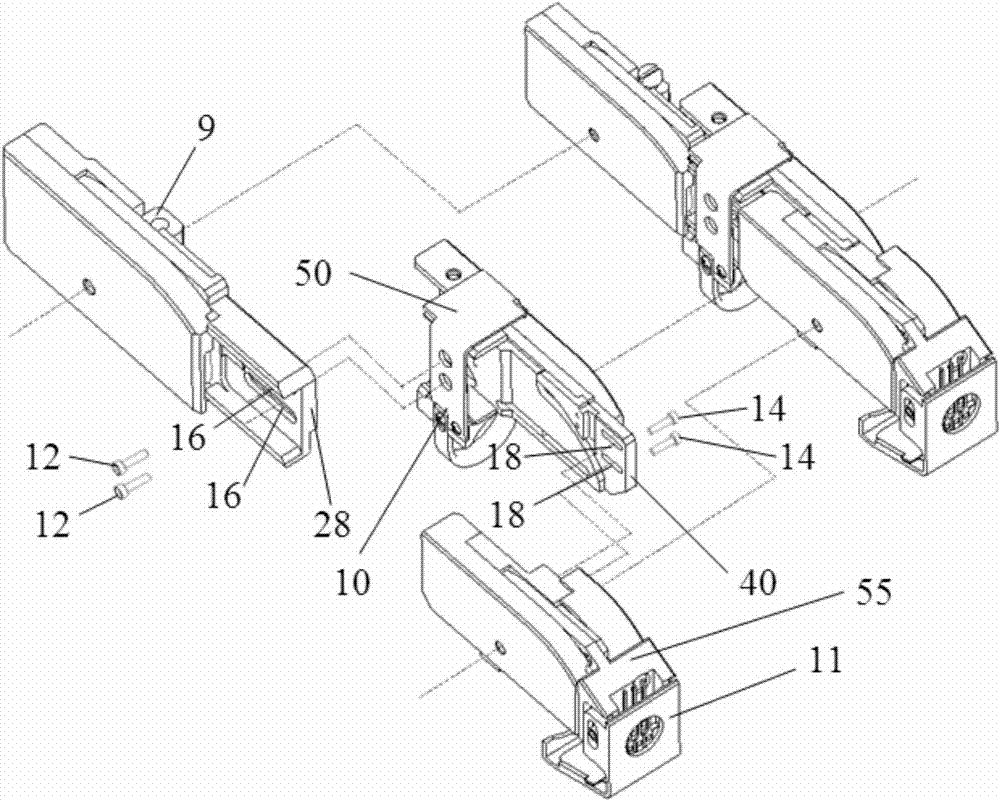
[0016] Specific implementation mode 1: Combination Figure 1-Figure 9 It is explained that an exoskeleton type hand functional rehabilitation robot of this embodiment includes an exoskeleton finger drive mechanism 1, an adaptive palm-back adjustment platform 2 and a rear artificial muscle module 3. The exoskeleton finger drive mechanism 1 includes an external Bone thumb 4, exoskeleton index finger 5, exoskeleton middle finger 6, exoskeleton ring finger 7, and exoskeleton little finger 8, exoskeleton thumb 4, exoskeleton index finger 5, exoskeleton middle finger 6, exoskeleton ring finger 7, and exoskeleton little finger 8 are all major It consists of metacarpophalangeal exoskeleton joint 9, proximal interphalangeal exoskeleton joint 10, and distal interphalangeal exoskeleton joint 11. The proximal interphalangeal exoskeleton joint 10 is set on the metacarpophalangeal exoskeleton joint 9 and the distal interphalangeal exoskeleton The three joints 11 are detachably slidingly conne...
specific Embodiment approach 2
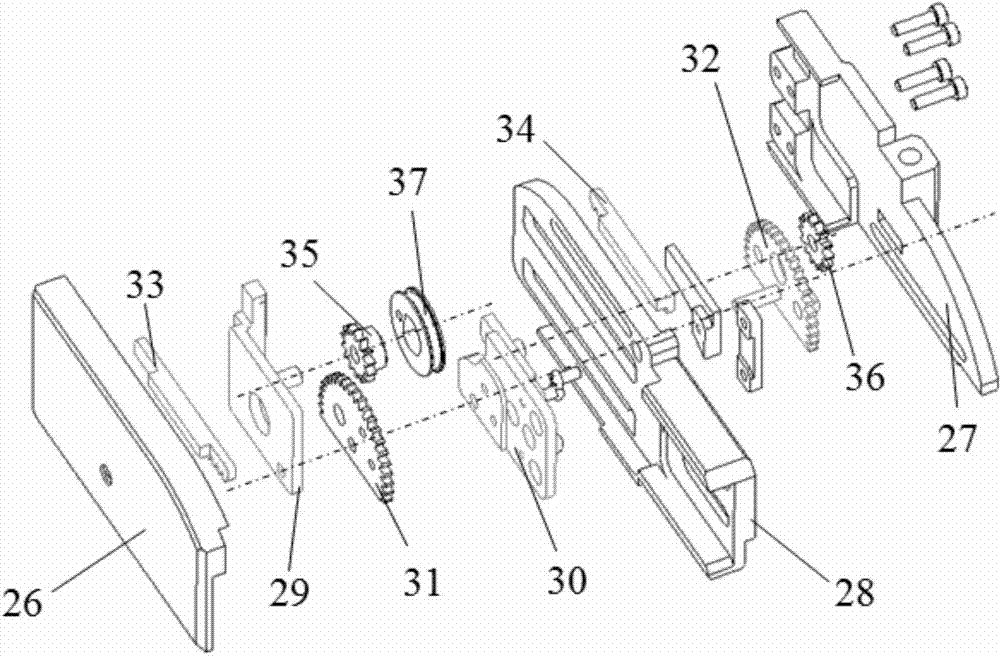
[0019] Specific implementation manner two: combination figure 2 with image 3 It is explained that the metacarpophalangeal exoskeleton joint 9 described in this embodiment includes a first joint left posterior plate 26, a first joint right posterior plate 27, a first joint anterior plate 28, a first posterior slider 29, and a first joint A front slider 30, a first sector gear 31, a first sector gear shaft 32, a first rear rack 33, a first front rack 34, a first reverse gear shaft 35, and a first reverse gear 36 And the first steel wire wheel 37; the first joint left rear side plate 26, the first joint right rear side plate 27 and the first joint front side plate 28 are arranged in parallel, and the first joint front side plate 28 is arranged at the first joint Between the left posterior plate 26 and the first joint right posterior plate 27, sliding grooves are respectively processed on both sides of the first joint anterior plate 28, and the first joint left posterior plate 26 ...
specific Embodiment approach 3
[0021] Specific implementation mode three: combination figure 2 with Figure 4 It is explained that the proximal interphalangeal exoskeleton joint 10 in this embodiment includes a second joint left posterior plate 38, a second joint right posterior plate 39, a second joint anterior plate 40, and a second posterior slider 41. , The second front side slider 42, the second sector gear 43, the second sector gear shaft 44, the second rear rack 45, the second front rack 46, the second reverse gear shaft 47, the second reverse Gear 48, second wire wheel 49, inverted U-shaped sensor frame 50, spacer 51 and U-shaped ring 52; second joint left rear side plate 38, second joint right rear side plate 39 and second joint front side plate 40 The three are arranged in parallel, and the second joint anterior plate 40 is arranged between the second joint left posterior plate 38 and the second joint right posterior plate 39. The second joint left posterior plate 38 is behind the second joint The...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap