Wheel-type stair-climbing wheelchair
A stair-climbing wheelchair and wheeled technology, which can be used in patient chairs or special transportation tools, vehicle rescue, medical transportation, etc., can solve the problems that restrict the research and development and promotion of wheeled stair-climbing robots, and achieve simple and reliable structure, Traveling speed and the effect of reducing production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
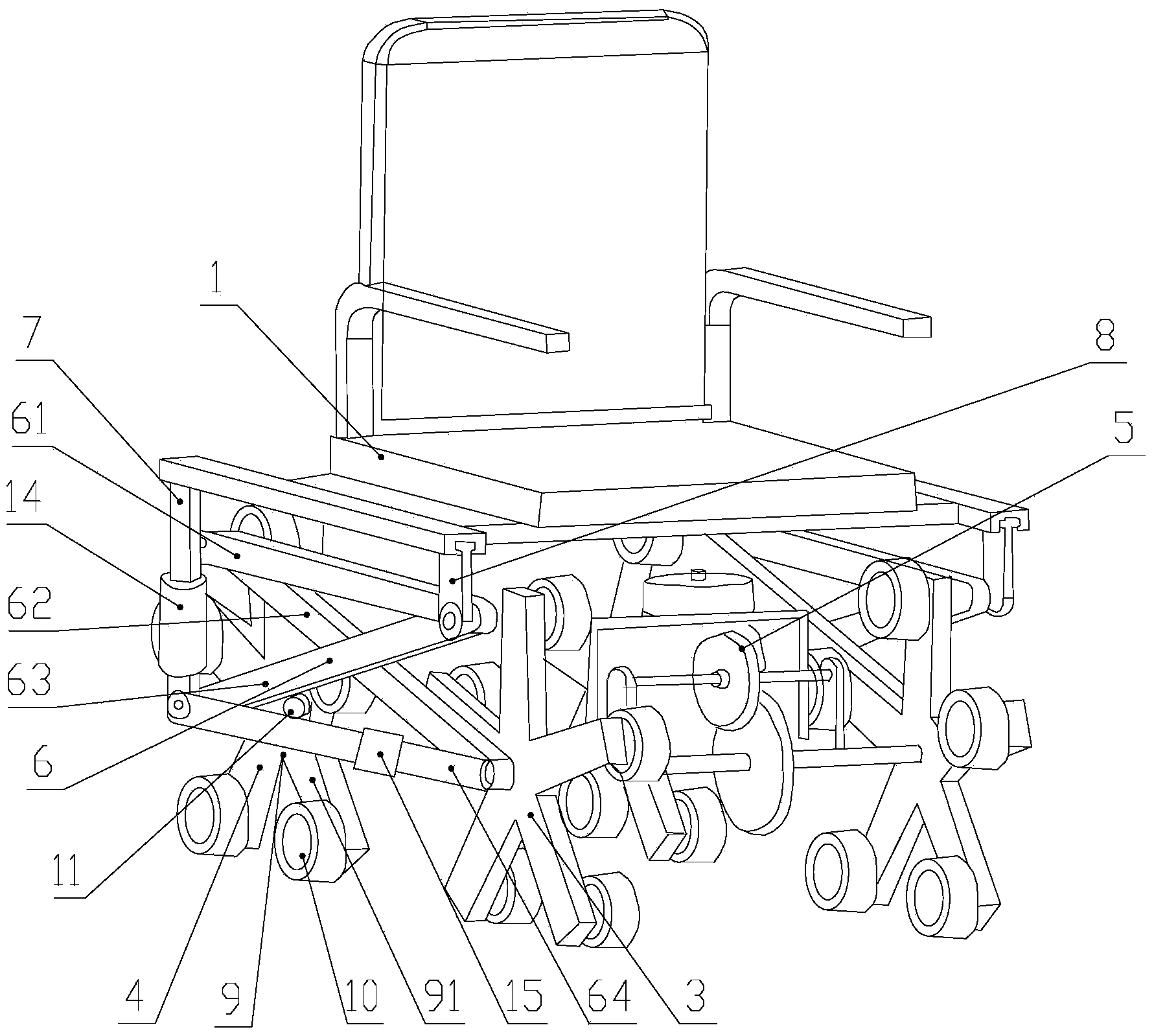
[0045] figure 2 It is a structural schematic diagram of the wheeled stair-climbing wheelchair provided in this embodiment. As shown in the figure, the wheeled stair climbing wheelchair includes a seat 1 and a driving device 5 . The front planetary gear 3 and the rear planetary gear 4 are respectively arranged on both sides of the driving device 5 , and the front planetary gear 3 and / or the rear planetary gear 4 are driven to move by the driving device 5 . The front planetary wheel 3 and the rear planetary wheel 4 on both sides of the driving device 5 are all connected with the seat 1 through the anti-parallelogram adjustment mechanism 6. When the wheelchair climbs stairs, the center of gravity of the seat is adjusted through the anti-parallelogram adjustment mechanism 6.
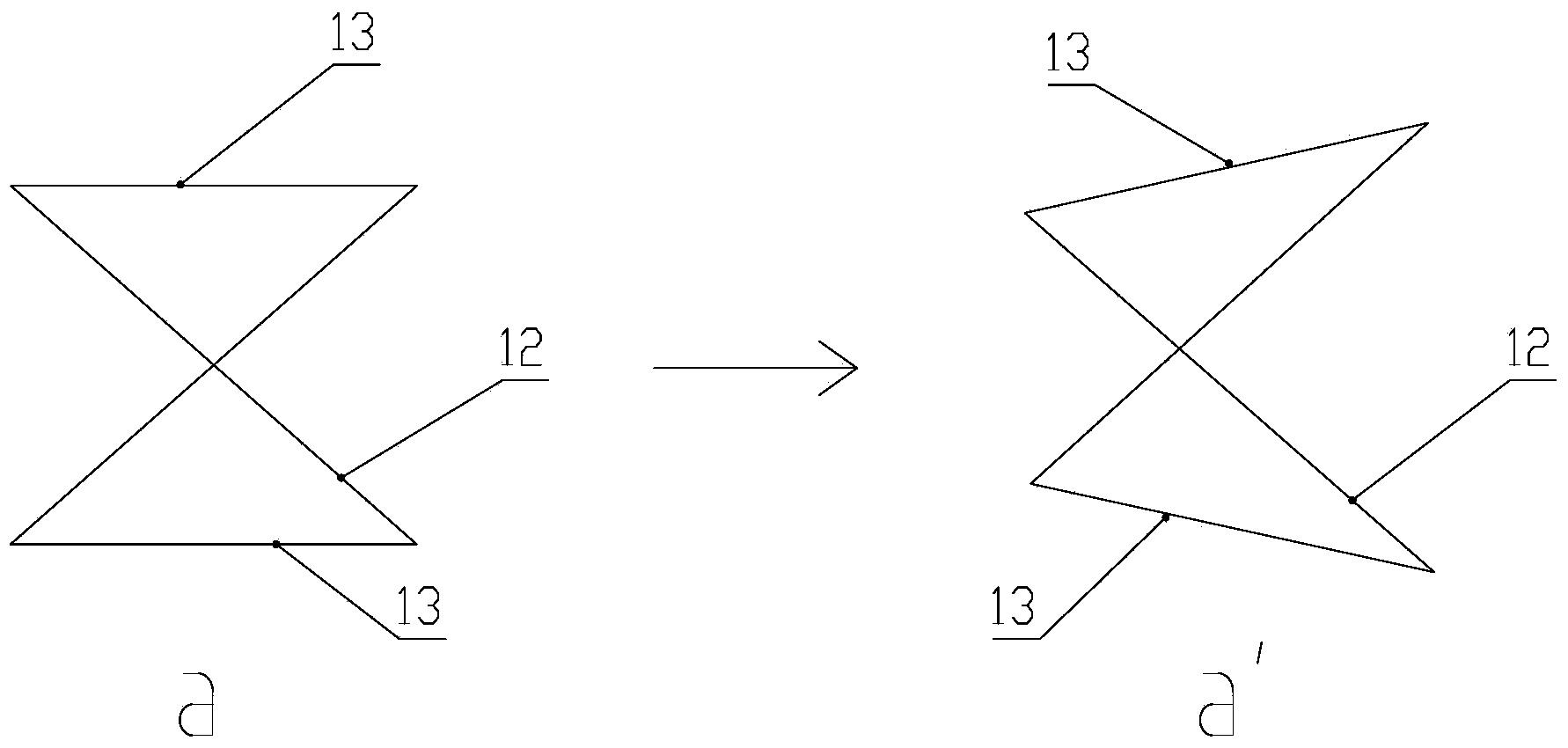
[0046] Wherein, the anti-parallelogram adjustment mechanism 6 includes an anti-parallelogram structure formed by hinge connection of the first balance bar 61, the second balance bar 62, the third balance b...
Embodiment 2
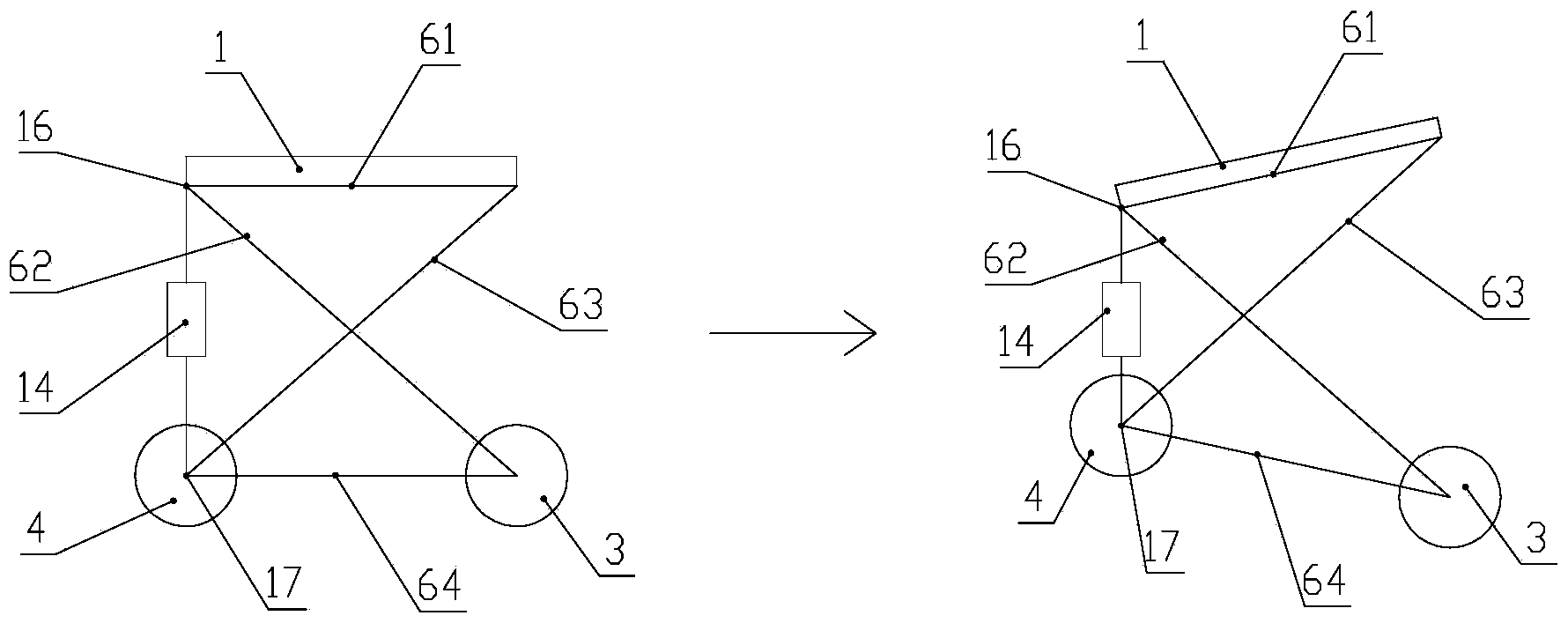
[0056] The basic structure of the wheeled stair climbing wheelchair provided by this embodiment is the same as that of Embodiment 1, including a seat and a driving device. Both sides of the driving device are respectively provided with a front planetary wheel and a rear planetary wheel. The front and rear planetary wheels on both sides of the driving device are connected with the seat through the anti-parallelogram adjustment mechanism, and when the wheelchair climbs stairs, the center of gravity of the seat is adjusted through the anti-parallelogram adjustment mechanism.
[0057] The difference from Embodiment 1 is that the first balance bar of this embodiment is directly arranged on the seat, thus saving the first connecting rod and the second connecting rod, and the second balancing rod and the first balancing rod are in the The first connection point is hinged, the third balance bar and the first balance bar are hinged at the second connection point, and the telescopic dev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com