

Robust self-adaptive track tracking control system for dynamic positioning vessel
A robust adaptive and track tracking technology, which is applied in the field of ship track tracking control, can solve the problems of high accuracy of model parameters and does not consider external interference, etc., to achieve strong robustness and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in detail below:
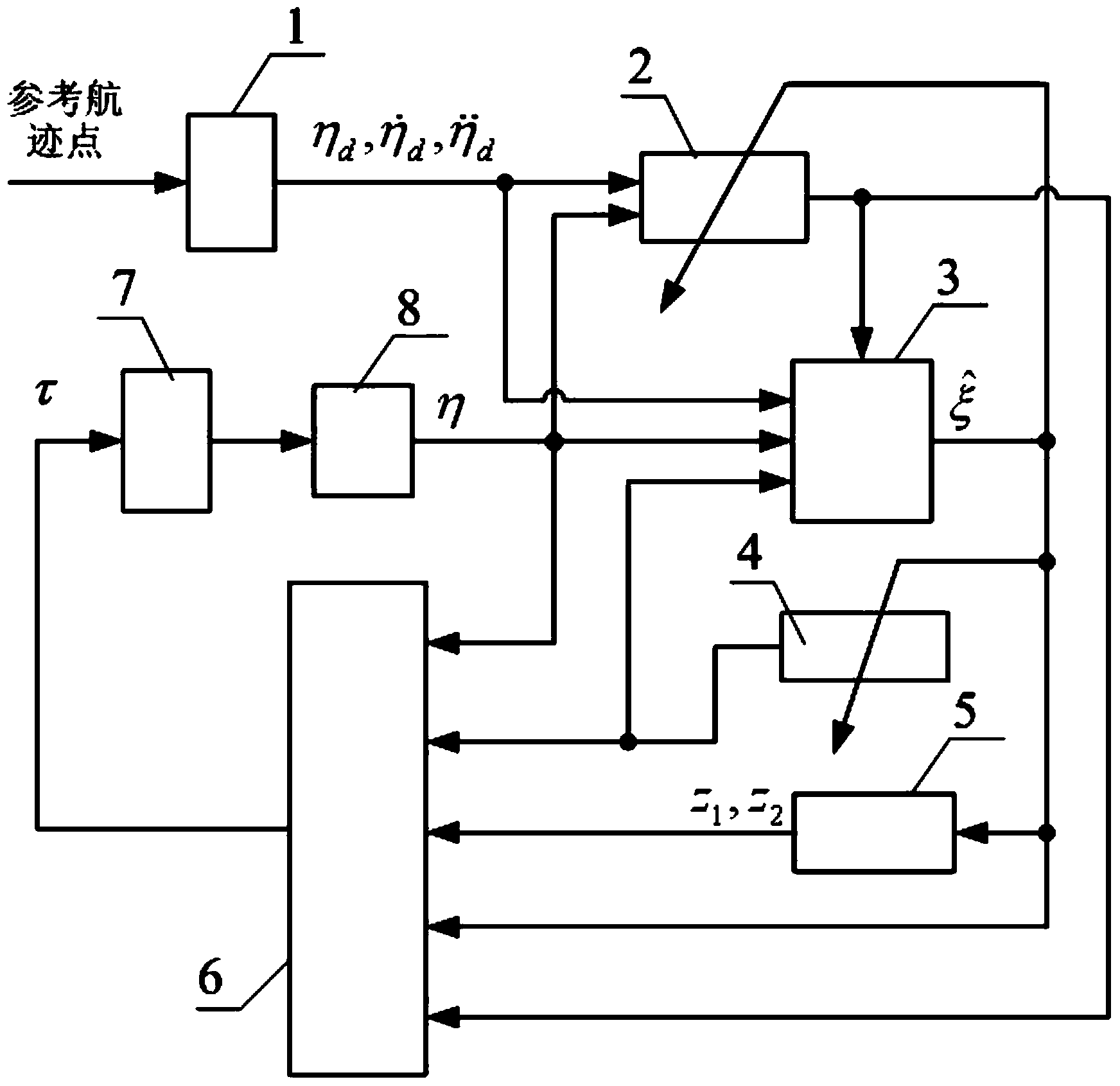
[0025] Such as figure 1 As shown, the dynamic positioning ship robust adaptive track tracking control system of the present invention includes a reference path generator 1, a neural network estimator 2, a second-order sliding mode observer 3, a disturbance estimator 4, and a diffeomorphism transformer 5 , controller 6. The position and angle sensor 8 collects the actual position and heading angle of the surface ship, as well as the reference position and reference heading angle information generated by the reference path generator 1, and sends them to the neural network estimator 2 and the second-order sliding mode observer 3 at the same time, respectively to obtain The estimated value of the model unknown nonlinear function and the estimated value of the state, and then the estimated value of the state is transmitted to the disturbance estimator 4 and the diffeomorphism transformer 5 at the same time, and the distu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More