

Mechanical arm simulation method based on virtual prototype technology
A technology of virtual prototyping technology and simulation method, which is applied in the field of manipulator simulation based on virtual prototyping technology, and can solve the problems of low relevance, high programming ability requirements, and poor integration of the manipulator simulation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
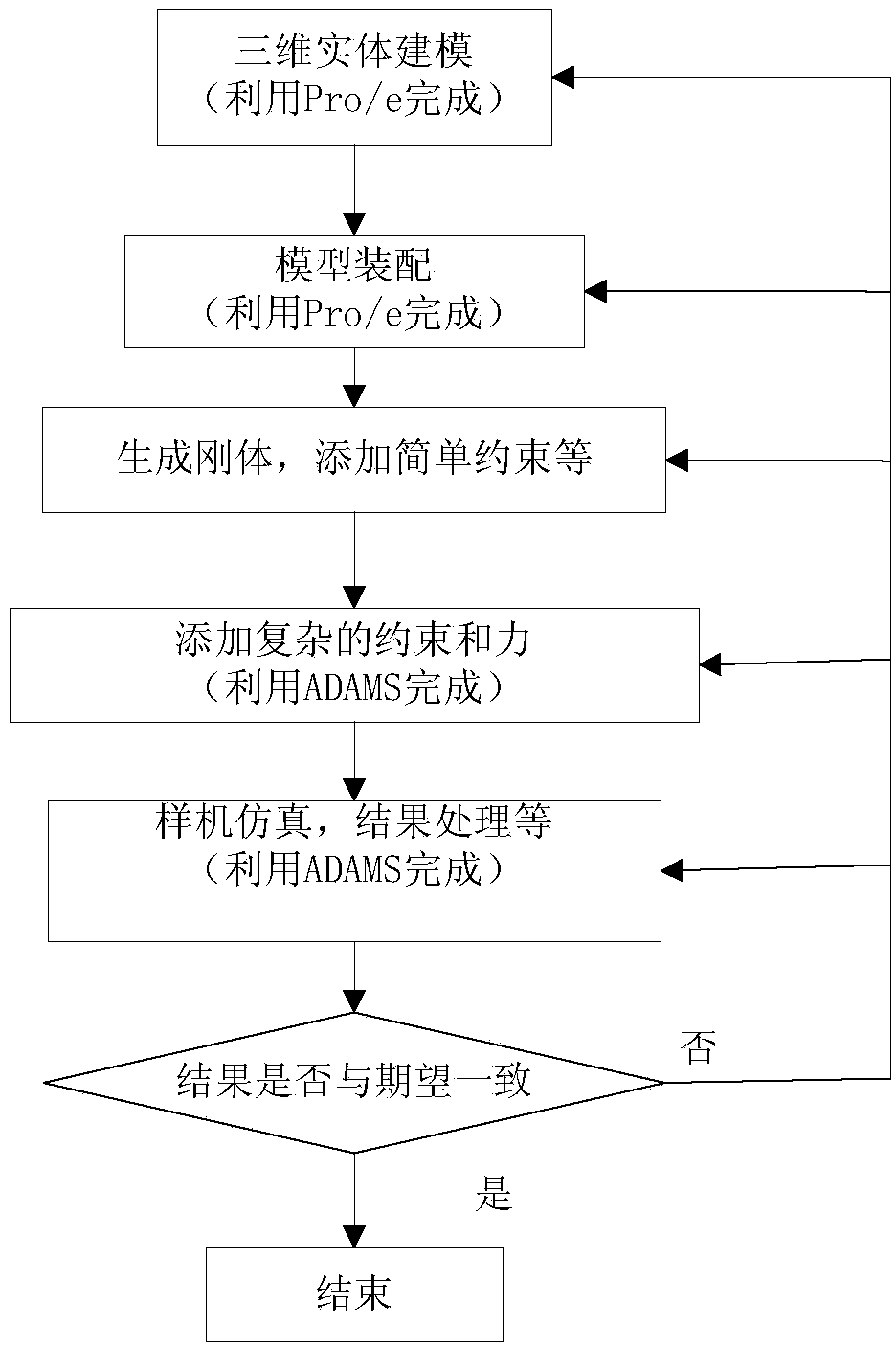
[0022] figure 1 As shown in the figure, the method includes the following steps: 1) Establish a 3D solid model of the robotic arm in 3D modeling software; 2) Import the established 3D solid model into Analyze in the dynamic analysis software of the mechanical system, re-add relevant parameters of quality, material type, motion constraints and force, and build a simulation analysis platform for the virtual prototype of the robotic arm; 3) Track and simulate the trajectory of the robotic arm in the workspace , and analyze the simulation results.
[0023] In this embodiment, the 3D modeling software adopts Pro / E, SolidWorks or CATIA, and the mechanical system dynamic analysis software adopts ADAMS.
[0024] The traditional trajectory planning method is essentially a pose inverse solution problem, that is, to find the pose inverse solution eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More