

Non-linear teleoperation system position and force tracking and controlling system with time-varying delay
An operating system and tracking control technology, which is applied in the direction of manufacturing tools and manipulators, can solve problems such as force errors and master-slave robot position errors, and achieve the effect of improving accuracy and solving the transmission delay of master-slave robot position signals and force signals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
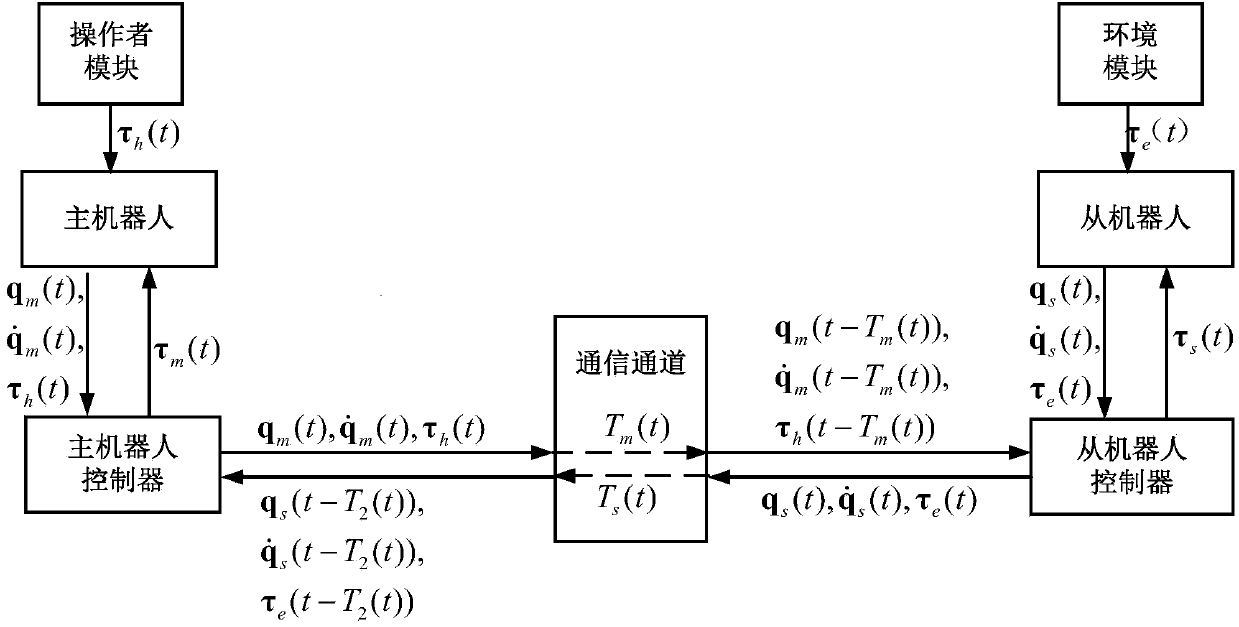
[0022] Such as figure 1 As shown, the present invention has a time-varying time-delay nonlinear telecontrol system position and force tracking control system, including an operator module, a master robot controller, a master robot, a communication channel, a slave robot controller, a slave robot and an environment module.
[0023] The forward time-varying delay of the communication channel is T m (t), the reverse time-varying delay is T s (t); the position q of the main robot m (t), the speed of the main robot The interaction force τ between the operator module and the main robot h (t), respectively become q through the communication channel m (t-T m (t)), τ h (t-T m (t)) is transmitted to the slave robot controller; the position q of the slave robot s (t), from the speed of the robot From the interact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More