

Robotic bionic wrist joint and its structure optimization method
An optimization method and wrist joint technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems that the three-dimensional movement of the motion platform cannot be realized, and the motion cannot be realized, so as to simplify the kinematics and dynamics model, improve the range of motion, The effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] specific implementation plan
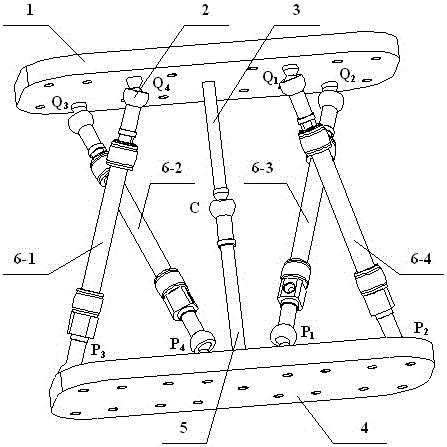
[0025] like image 3 As shown, a bionic wrist joint is now provided, including a motion platform 1, a spherical pair 2 (Q 1 , Q 2 , Q 3 ,P 1 ,P 2 ,P 3 ,P 4 , C), composed of upper fixed rod 3, fixed platform 4, lower fixed rod 5 and pneumatic artificial muscle 6.
[0026] Each driver is composed of a pneumatic artificial muscle and two spherical pairs, the spherical pair is connected with the pneumatic artificial muscle through threads, and the spherical pairs at both ends are connected to the moving platform and the fixed platform. Keep Spherical Vice Q 1 , Q 2 , Q 3 , Q 4 The plane where the center is located is parallel to the motion platform, and the spherical pair P 1 ,P 2 ,P 3 ,P 4 The platform on which the center is located is parallel to the fixed platform. in Q 1 , Q 2 , Q 3 , Q 4 The plane composed of the center (as the motion plane) establishes the motion coordinate system A, and the spherical pair P 1 ,P 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More