Two-dimensional linear air float guide rail type mechanical arm gravity compensation device
An air-floating guide rail and gravity compensation technology, which is applied to manipulators, manufacturing tools, etc., can solve the problems of drive motors not operating normally, damage to manipulators, etc., and achieve the effects of easy understanding and implementation, simple mechanism, and little influence of deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
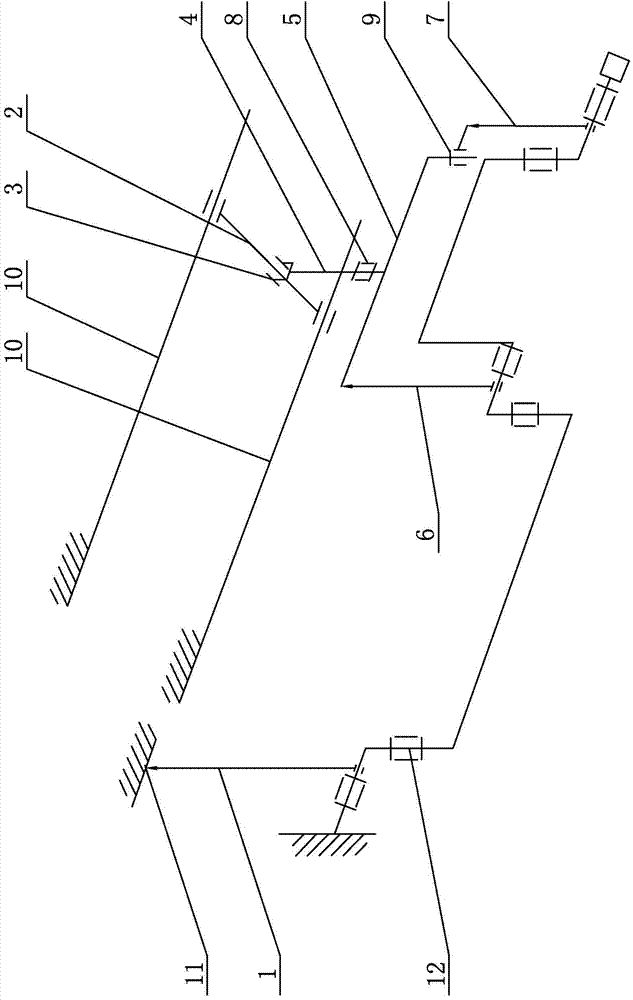
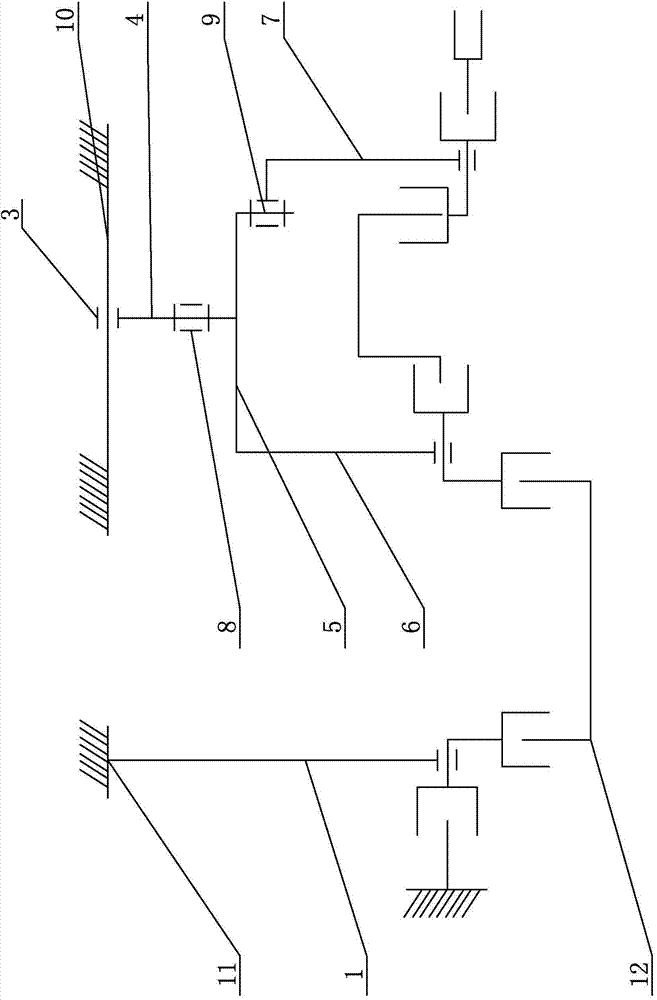
[0007] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment, the two-dimensional linear air-floating guide rail type mechanical arm gravity compensation device in this embodiment includes a first suspension rope 1, a first linear air-floating guide rail 2, a moving slider 3, a second suspension rope 4, two Revolving hanger crossbeam 5, the 3rd suspension rope 6, the 4th suspension rope 7, the first slewing mechanism 8, the second slewing mechanism 9 and two second linear air-floating guide rails 10, the upper end of the first suspension rope 1 and the first The suspension point 11 is fixedly connected, the lower end of the first suspension rope 1 is connected to the left end of the mechanical arm 12, two second linear air-floating guide rails 10 are arranged side by side in parallel, and the first linear air-floating guide rail 2 is arranged on the two second linear air-floating guide rails. Between the guide rails 10, and the centerline ...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination figure 1 with figure 2 This embodiment will be described. The upper end of the first suspension rope 1 of the two-dimensional linear air bearing guide rail type manipulator gravity compensation device in this embodiment is connected to the first suspension point 11 through a fixed air bearing.
[0009] The technical effect of this embodiment is: set in this way, the upper end of the first suspension rope 1 is fixedly connected through the air bearing, so that the position of the left end of the mechanical arm 12 does not change, so the first suspension rope 1 remains vertical all the time, the first suspension The zero gravity compensation can be realized when the rope 1 is fixed. Other components and connections are the same as those in the first embodiment.
[0010] working principle
[0011] The upper end of the first suspension rope 1 is fixedly connected by an air bearing, so that the position of the left end of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More