

Poking type pole-climbing robot
A robot and pole-climbing technology, which is applied in the field of pole-climbing robots, can solve the problems of high cost, complex structure, and inconvenient practical application, and achieve the effects of firm grip, coordinated and stable movement, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
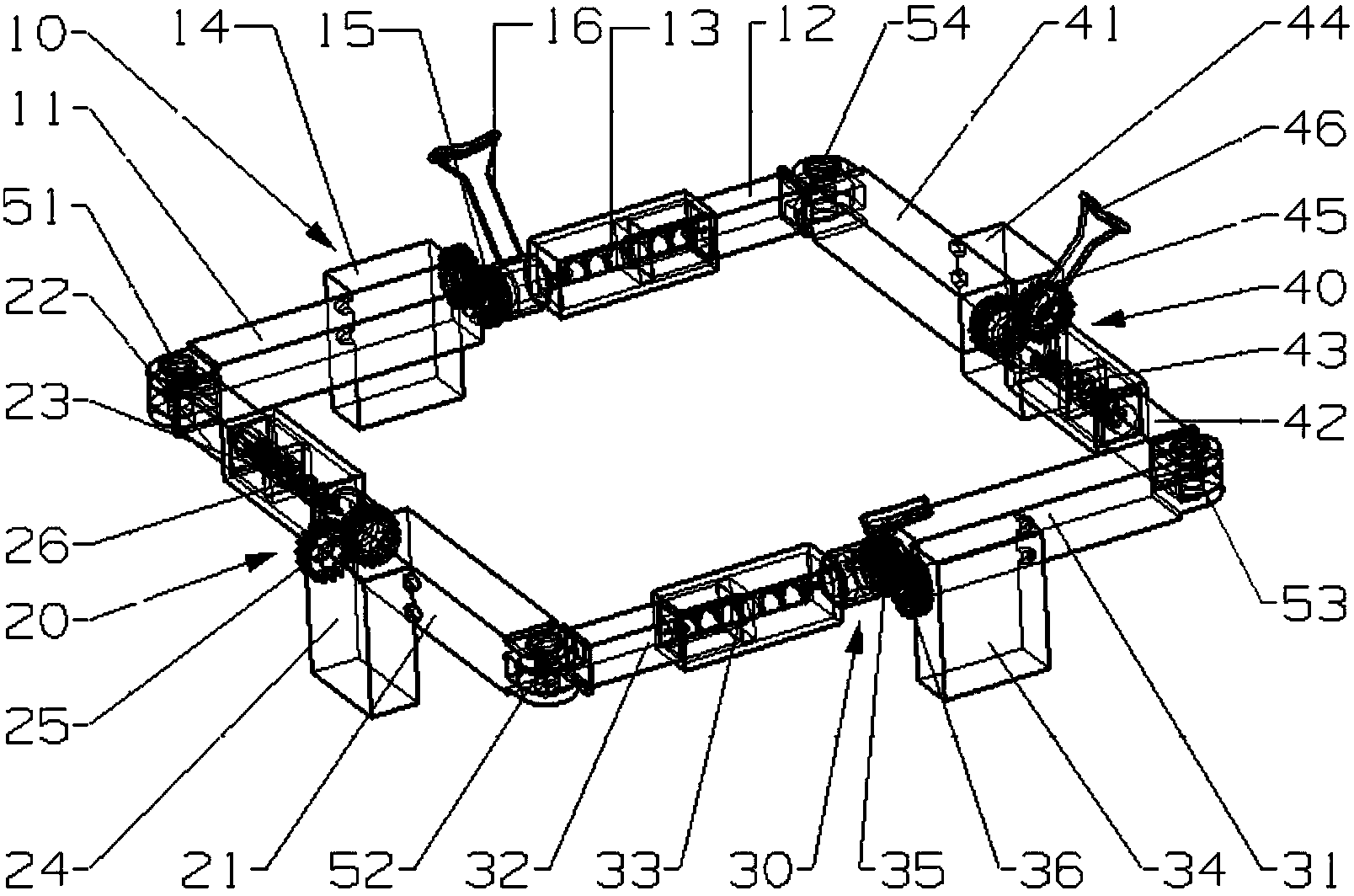
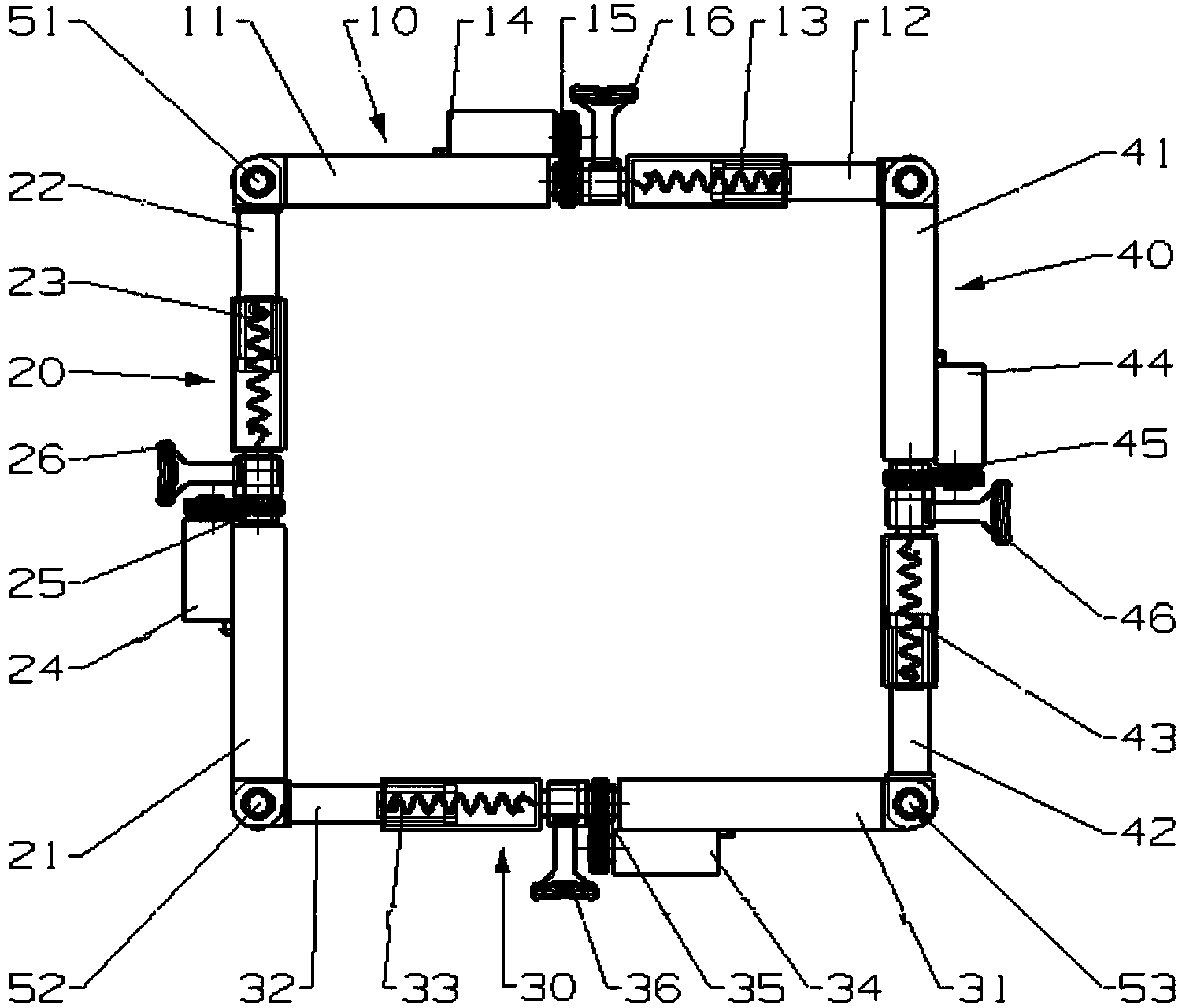
[0021] figure 1 and figure 2 A specific embodiment of the toggle type pole climbing robot of the present invention is shown, which includes a first climbing pole 10, a second climbing pole 20, a third climbing pole 30 and a fourth climbing pole 40, the first climbing pole The first and last ends of the rod 10, the second climbing rod 20, the third climbing rod 30 and the fourth climbing rod 40 are respectively hinged in sequence through the second hinge 52, the third hinge 53, the fourth hinge 54 and the first hinge 51, thereby forming A rectangular ring structure, and the first climbing pole 10, the second climbing pole 20, the third climbing pole 30 and the fourth climbing pole 40 adopt the same structural form, specifically:
[0022] The first climbing rod 10 is composed of the first base rod 11 and the first telescopic rod 12 that are coaxially connected, the first toggle finger 16 that is rotatably connected to the first base rod at one end, and is installed on the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More